The most significant risks to the success of this project are interfacing parts with the Jetson Xavier, like the motor and motor driver. These risks are being managed by the team allocating more time in the schedule to connect these parts. We have a Jetson Nano and a Jetson Xavier, so we will have multiple people working on this as a contingency plan if necessary.
No changes have been made to the existing design of the system.
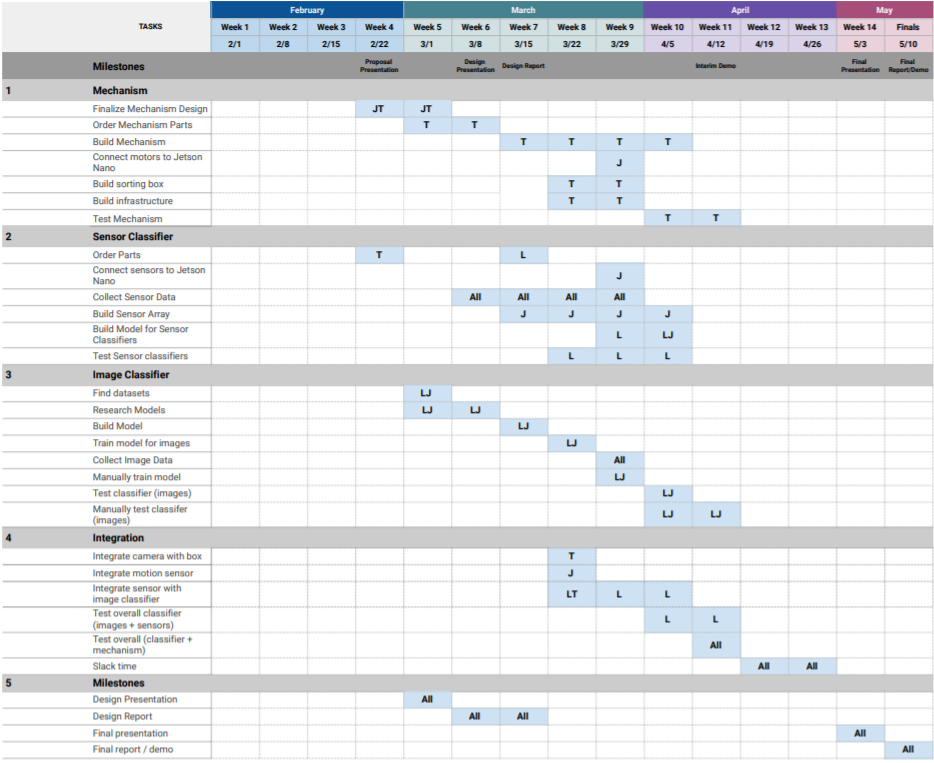
We are pushing back hooking up the motor and motor driver to the Jetson Xavier by a week (moving it from week 3/22 to 3/29). We have attempted to connect them this week, but didn’t get the motor to move yet.