Final Video
Final Poster
Team’s Status Report for 05/08/2021
Updates
This week we spent a lot of time preparing and participating in the final presentation. Overall the presentation went well for our group, and we got some useful feedback that we can use in our final report.
Progress Made
We got some more data points in order to better justify our conclusions and started on the remaining assignments. For the final report we were able to adapt our design report as a good foundation to start on. We were also able to use some of the information from our presentations to work on the poster. We all started working on our contributions to the video and recorded some footage of our device.
Upcoming
For the remaining time we will finish up these artifacts and and prepare for the public demo as overall our project is finished.
Txanton’s Status Report for 05/08/2021
General Updates
This past week we had our final presentation. I feel that it went well and we got some useful feedback that we can use on our poster and in our final report. Overall our project is looking good and I am happy with the way it has turned out with the constraints we had.
Progress
After the presentation we did some final testing to solidify our conclusions. I also started working on the final poster and starting on our final report. Luckily we were able to use some components of our design report to get us some good progress on the final report.
Upcoming
In the upcoming week I will continue to work on the report and poster for the final public presentation so that we can get our project all wrapped up.
Final Presentation Slides
https://docs.google.com/presentation/d/164T_g2PU3tp2WCL6I3Mryb77Qq8YqoJDY_1X24cXPTU/edit#slide=id.gd6ddefe4b4_0_128
Txanton’s Status Report for 05/01/2021
This week we had the discussion with the Eberly center which I felt was pretty productive. We were able to give some feedback which seemed to be well received and we were also able to hear some of the experiences of the other teams.
Regarding the project, this week I helped to interface the overlay code with the beamforming code by receiving the data over UDP. I also helped to tweak some of the specific values as we were testing in order to make the overlay code better correspond with the constraints of our system. Luckily from our testing it seems to be corresponding with the location of the transmitting device pretty well so I am hopeful that we won’t need to make any significant changes for the final video.
Next week I will continue to help the team test the accuracy and make any future adjustments as we prepare for our final video and report.
Team Status Report for 04/24/2021
This week we had our ethics discussion where we were able to get some valuable feedback about some ethical considerations for our project. This will be useful for our final report and gave us some additional perspective for our future work.
Regarding our project, this week we worked on getting the beamforming array to work with 4 SDR’s and antennas. After updating our beamforming pipeline to receive data from all 4 antennas and adjusting the algorithm to use 4 inputs instead of 2, we were able to get an angle of arrival for the signal picked up by the antenna array. We also made progress on the heatmap overlay code and are able to now draw boxes over of the webcam input based on the calculated angle of arrival. This means we have the two subsystems of our project mostly complete and will be able to start integrating them next week.
Next week we will continue working on integrating the two subsystem’s so that the vision pipeline is actually receiving data from the beamforming pipeline instead of the dummy test data. After that all we will have to do is more testing and minor adjustments and then we should be on track to finish our project.
Txanton’s Status Report for 04/24/2021
This week we had our ethics discussion. I found the meeting to be pretty interesting as before I read the papers assigned I had a very different view of engineering ethics. Typically I thought of issues such as computer vision with biased/non-diverse data sets leading to discrimination, but after reading the papers it opened my eyes to more intentional ethical decisions such the parkways in New York.
Working on our project, I spent this week working on expanding the image overlay code. I started making it so that we can overlay a box after receiving an angle from the beamforming array. What I am doing to attempt this is by dividing the horizontal resolution by the horizontal field of view of the camera. This has been a little difficult to find as most manufacturers only provide the diagonal field of view. After performing this calculation I have an approximation for how many pixels correspond to 1 degree which I can use to then draw a box around that angle that was provided by the beamforming algorithm. Currently this is only in one dimension, however the process should be pretty easy to adjust to make it two dimensional once the antenna array has been formed that way. Since we are testing and I am remote I am not 100% up to date on the accuracy of the beamforming array so I currently have it placing a larger box around the calculated angle that corresponds to +/- 5 degrees in order to account for inaccuracy of the algorithm. The number of degrees for this box is also very easy to adjust so once I fully know the general accuracy of our array I can update that to correspond.
For next week I am going to continue to work with the rest of my team to update these values to make them more actually correspond with our measurements. I will also be doing some I/O in order to receive the angle from our beamforming algorithm as currently they are two separate things and I have been testing my angle based boxes using hard coded values and loops not actual data points. I will also update the code to use 2 angles to affect the box’s vertical size as well if we decide to make our array in that orientation.
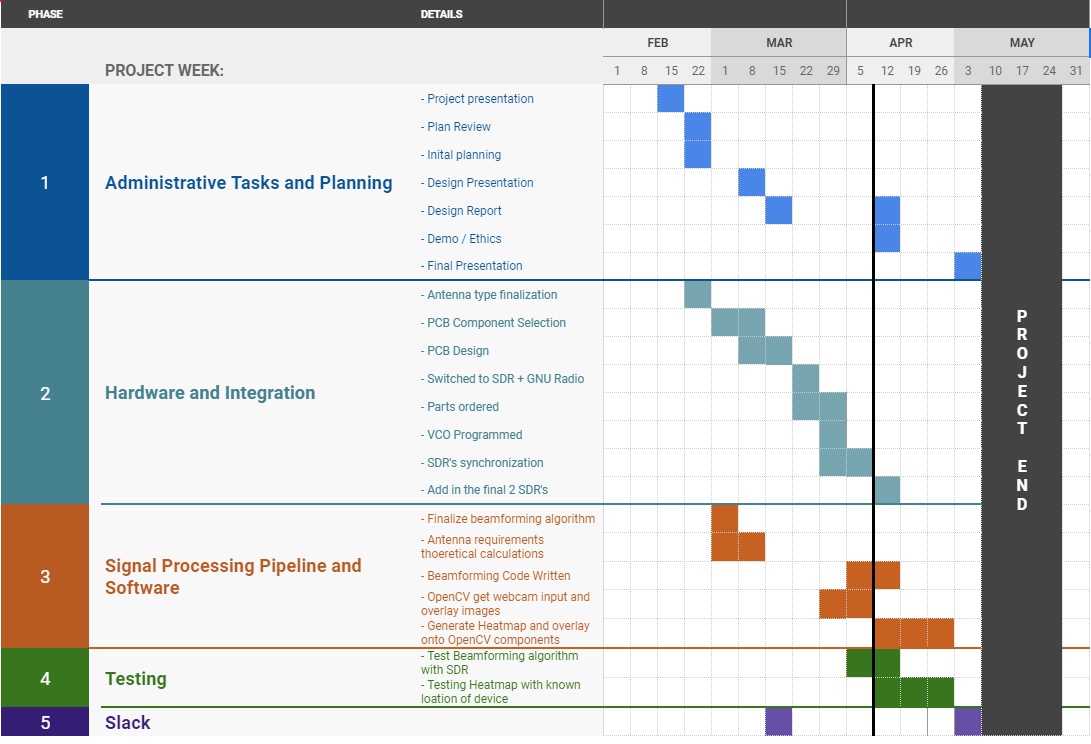
Updated Schedule