
The team is wrapping up on all the deliverables due this week. Judy is working on the poster. Devon and Christina are working on the video. We’re all collaboratively working on the final report based off the design report. Specific to the actual project, Judy has been working out the kinks in the subprocess calls. Christina is working on image calibration to the model. Devon is working on integrating the warping model.
Christina’s Weekly Status Report for May 8
This week I have been working on wrapping up all of the deliverables. Specifically, Devon and I are working on the video. I am refining the appearance of the current UI and calibrating the size and position of the clothing image to fit best true to life (this is for superimposition). One thing to note is that it is really hard to take good images of our project since it’s reflective, but we’re trying our best to show it. Here are some screenshots from our final video.

Team Weekly Status Report for May 1
This past week we have still been working on finishing up and polishing our different parts where Judy is working on the UI, Christina is working on the matching algorithm and testing script, and Devon is working on integrating the warping model into our project. We laser cut a hole in the mirror so that we can fit the camera through and now our hardware system is officially done. We also worked on the final presentation slides this week and plan to film parts of the final video soon.
Christina’s Weekly Status Report for May 1
This week I’ve been focusing on writing a testing script so that we can have some quantitative metrics for our final presentation next week. We are testing by running the matching algorithm on different models with the same clothing and manually selecting the superimposed images that look passable. This was a suggestion that Marios gave us during our weekly meeting and we all agreed that it made the most sense for testing usability and precision. Currently I have ran the testing script with one shirt on 2032 test images of models from the warping model. We will select visually passable images and include the results and observations in our final presentation. Note this is only for superimposition, not warping since that has yet to be integrated. I’ve included some example outputs below.
Unpassable example:

Passable examples:


Team Weekly Status Report for April 24
Last week, the team worked on preparing for the interim demo. This week, we are primarily working on areas of feedback we got from the demo and improving our existing algorithms. The hardware system is basically completed. We used command strips to attach the mirror to the monitor to make it easy to take off and make adjustments. Currently, the camera is taped to the side of the mirror and the Jetson system is attached in a pocket behind the monitor. The one refinement we want to make is making a better camera attachment by laser cutting a hole on the side of the mirror to fit the lens through. Judy has begun working on the tkinter user interface. Christina created a preliminary matching algorithm and is working on improving it. Devon is working on training a model for image warping which we hope to integrate for the final demo. An image of the hardware system is attached below.

Christina’s Weekly Status Report for April 24
Last week I was preparing for the interim demo by displaying the preliminary matching algorithm through tkinter. This isn’t the final matching algorithm since we hope that the ML model Devon is training and working on integrating will be what will be using for the final matching algorithm. The preliminary algorithm takes in the two key point jsons OpenPose generates of the user and the clothing image. These are normalized as a value of 0 to 1 based on the x, y ratio in comparison to the entire image. The center points are matched and the points are created and the clothing image is rendered on top of the user with PIL to register PNG transparency. I’ve attached a picture of the results below. As you can see, it’s not perfect at all. So this week I’ve been working on finding what’s wrong with the normalization process I go through, since visually comparing the jsons, we’re getting a pretty accurate center point position. I’m still working on this, but I suspect it’s because the ratios are calculated from different sizes of picture. I’m not what the right way to go about correcting this is, but probably doing some more math on normalizing the size ratios.

Christina’s Weekly Status Report for April 10
This week, I worked on reworking the matching algorithm to accommodate the use of the Deep_Fashion_Try-on ML model which trains on a set of OpenPose json responses to match key points on uploaded images of clothing to a user image. This needs to be integrated with the model that Devon is currently training, so we hope to accomplish this before the demo. This should give us exactly the try-on effect we desire. The result will be as follows:

At this point, we will only allow users to upload pre-background-subtracted images.
Construction of the mirror is going at a really good pace, the hardware subsystem itself should all be complete.
References:
Christina’s Status Report for April 3
This week I have been working on the matching algorithm. I’ll be able to get the fixed point output json from the two images (clothing and user) and use the distance formula to figure out the relative distance. By using arctan function tan^(−1)(𝑦/𝑥)=𝜃, I can isolate the angle the line the two points create relative to the horizontal axis. With this information, I’ll be able to figure out where to place the image over the user by aligning the shoulder points, which will give a pretty accurate centering for the clothing, even though it doesn’t look perfect with superimposition.
On the hardware side, I worked with Judy and Devon to get OpenPose set up on the Jetson. On my end, we’ll need to figure out how to hook up the camera to get a video feed and get the subsequent fixed points in the format I expect for the matching module.

Christina’s Status Report for March 27
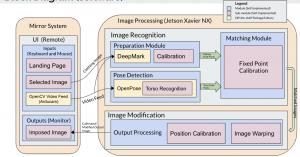
Last week, I worked on the Design Requirements, Software Architecture, Software Trade Studies, Software System Description, and Risk Management sections of the Design Report. I also created a more generalized block diagram of our entire system for the overall system structure to add to our Design Report as well. This attached below.
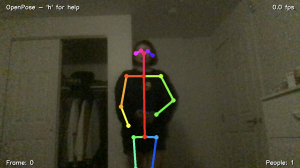
These past week has largely been dedicated to figuring out and learning how OpenPose works as well as playing with the configurations on my laptop before deploying to the Jetson. Unlike we previously thought, we probably won’t need to subtract functionality from the 17 fixed point setting since this already doesn’t include hands. By Marios’ suggestion of using GPU mode instead of CPU-ONLY mode in the cmake configuration of OpenPose, it runs much faster on my laptop now. The image below shows that OpenPose works with baggy clothing. I am also working on figuring out a background subtraction algorithm that we can use to isolate the clothing image.
Block Diagram:
OpenPose Testing:
Christina’s Status Report for March 13
This week I focused on preparing for the Design Review Presentation as I was the designated presenter this time around. I think it went pretty well. Reviewing the peer feedback, it seems most think we have a reasonable scope and design approach, which is reassuring. We got some very good feedback from the faculty on specific aspects of the project. Knowing that the Xavier will be treated as an item we’re borrowing opens up our budget a lot and gives flexibility for buying doubles if needed. As we wait for our parts to come in, I’ve started the setup for OpenCV and OpenPose. I’m following the installation guide on the github for MacOS. There are still some setup bugs, but I hope to begin playing around with torso recognition soon. I talked to the Work It team briefly after hearing their Design Review Presentation to get some insight on subtracting unnecessary functionality such as finger and lower body recognition since they also are using OpenPose. I’ll be using that advice as I continue to play around with OpenPose. I want to have a good understanding of it before the hardware comes in.