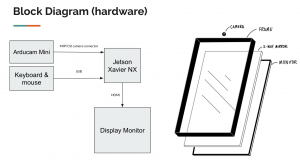
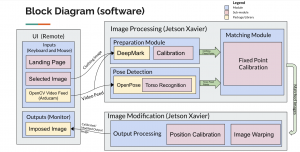
This week, we finalized our hardware list and filled out the forms for ordering our parts and are waiting on them to come in this week. We’ve starting thinking more about the details of how we will implement our design. Drawing the block diagrams allowed us to realize pieces of our design that we haven’t ironed out the details of such as the matching module. We’ll have to check the outputs of OpenPose and DeepMark and figure out how each set of fixed points correlate. At this point, this is still an unknown and is high priority to test out. Furthermore, the Jetson SDK’s interaction with the other software components are also unknown at this point, but we’ll have to hold on this until we get the Jetson. Our hardware and software block diagrams are shown below.