
This past week we have still been working on finishing up and polishing our different parts where Judy is working on the UI, Christina is working on the matching algorithm and testing script, and Devon is working on integrating the warping model into our project. We laser cut a hole in the mirror so that we can fit the camera through and now our hardware system is officially done. We also worked on the final presentation slides this week and plan to film parts of the final video soon.
Team Weekly Status Report for April 24
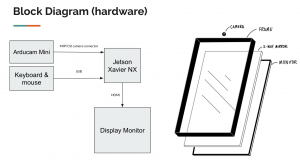
Last week, the team worked on preparing for the interim demo. This week, we are primarily working on areas of feedback we got from the demo and improving our existing algorithms. The hardware system is basically completed. We used command strips to attach the mirror to the monitor to make it easy to take off and make adjustments. Currently, the camera is taped to the side of the mirror and the Jetson system is attached in a pocket behind the monitor. The one refinement we want to make is making a better camera attachment by laser cutting a hole on the side of the mirror to fit the lens through. Judy has begun working on the tkinter user interface. Christina created a preliminary matching algorithm and is working on improving it. Devon is working on training a model for image warping which we hope to integrate for the final demo. An image of the hardware system is attached below.

Team Status Report for March 6
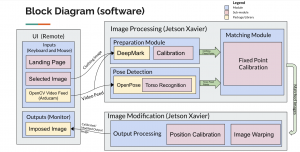
This week, we finalized our hardware list and filled out the forms for ordering our parts and are waiting on them to come in this week. We’ve starting thinking more about the details of how we will implement our design. Drawing the block diagrams allowed us to realize pieces of our design that we haven’t ironed out the details of such as the matching module. We’ll have to check the outputs of OpenPose and DeepMark and figure out how each set of fixed points correlate. At this point, this is still an unknown and is high priority to test out. Furthermore, the Jetson SDK’s interaction with the other software components are also unknown at this point, but we’ll have to hold on this until we get the Jetson. Our hardware and software block diagrams are shown below.
Team Status Report for Feb 27
This week we mainly focused on the proposal presentation and trying to be as prepared as we could for that. We got some good feedback from our peers and really tried to focus on the lack of metrics we had for the testing phase. Now that we have a relatively formalized gant chart, we have a better idea of the big picture and what should be happening right now, so all of us are doing more research on the specificities of our respective tasks (Christina on torso recognition, Devon on clothing recognition, Judy on UI/mapping).
Team Status Report for Feb 20
Team:
This week, we had our first meeting with our advisor Marios Savvides. During our meeting, he gave us a lot of great advice on what materials to buy and which technologies to use to build our smart mirror. Next, we met to discuss the specifics of our project to incorporate them into our proposal presentation. We each wrote a couple of slides then we met together again to refine and polish the presentation for next week. Lastly, we set up our wordpress site and customized it so we could post our weekly reports as well as our slides onto the wordpress.