
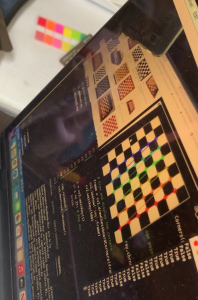
This week I have detected some chessboard corners. I made two ways of doing this; the first way is to use my internal camera to detect chessboard in real-time. The other way is to simply just use frames to detect the corners. I also realized it might be better to first simply work on frames first and then try to do real-time if necessary. Some issue that I found was that the detection of chessboard works on a black and white chessboard, which is not the one I have currently. When I get back to US, I think I can use the black and white board so that it works much better. I have also worked on the design presentation as well with my group.
As for the schedule, I am on schedule with the initially planned schedule.
Next week, I am going to try to figure out the coordinates of the chessboard tiles to make a grid structure. After discussing with my teammates, this seems like the easy way to go about detecting moves since the board is almost not recognizable by the chessboard when it has pieces on it.