As the professor and the TA recommended, we decided to use Raspberry Pi and FPGA instead of using a computer. We believe the computer vision part of our project and the user interface can be run through RPI and FPGA can take care of every move generation and chess AI. It makes sense that RPI can handle image processing, so it is unnecessary to use a computer for image processing.
Since we decided to use RPI, we had to do some research on how FPGA and RPI will be communicating. We figured out that we can still use the UART connection from FPGA to RPI for the communication between two hardware and use the ARM core processor for running an AI on FPGA. Once we are finished with board detection on the computer vision side of the project, we are planning to try out the aforementioned communication between RPI and FPGA so that we can confirm this design works well.
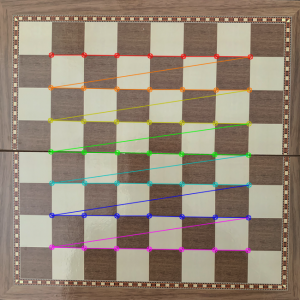
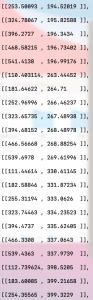
Joseph and Jee Woong made some progress on board-detection, and Michael is testing the ARM core processor based on the setup he created last week. It is good that all our team members are following the schedule we planned.