Accomplishments this week
1.Change M2 from stepper motor to servo
- When searching for appropriate M2, the limited torque M1 can bring is my big consideration. A searched for many stepper motor models, but all has large dimension (around 40mm * 40mm) and large weight (around 350g).
In order to flip a letter sized book from both direction, the shaft needs to be roughly 20cm long. The weight of acrylic needed to create the shaft is about 20g, so the torque from shaft on M1 is roughly 10cm*20g = 200 gcm.
If I use a servo, the torque from servo is 20cm * 40g = 800 gcm, which in total requires 1 kgcm.
If I use a stepper motor for M2 instead, the torque from M2 is 20cm * 350g = 7000 gcm, which in total requires 7.2 kgcm.
However, the average torque of stepper motor is around 5 kgcm. So the tradeoff here is to use servo in stead of stepper motor as M2 to reach desired torque. - The requirement for M2 is to have compatible wheel to twist page. For servos, I have found servo packet that comes with wheel. I can add rubber band to increase the friction between the wheel and the paper.
- With that in mind, I ordered the servo with wheel model from Amazon and they are estimated to arrive next week.
2.CAD Shaft
- For this week, I spent some time reviewing basic tools in Solidworks. I took a class in Solidworks and Laser Cutting three years ago but I have forgotten most techniques. I refreshed my memory in sketch, smart dimension, extrude, and etc.
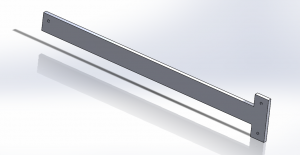
- The CAD shaft has left end height 10mm, right end right 30mm, and length 200mm. The left end from the figure below is where M1 lift the shaft. The right end is where the servo will be assembled to control the wheel.
- The extrusion is currently set to 3mm, but needs a finalized value after I talk with my TA and Quinn about what material the class could provide.
3. Setup Raspberry Pi
- From the ECE hub, I borrowed a Raspberry Pi Model 3 B+
- With the help from Professor, I also borrowed data cable and SD card
- I found this tutorial about setting up Raspberry Pi. Following the tutorial, I have finished setting up the SD card.
- I still need to figure out other required cables to setup the hardware.
Progress for schedule:
- On schedule
Deliverables I hope to accomplish next week:
- Setup Raspberry Pi
- Solder stepper motor driver on Raspberry Pi and control stepper motor with Raspberry Pi
0 Comments