We’re continuing our investigation with implementing 1Gbps Ethernet with our FPGA. The Spartan 6 board does come with two Gigabit Ethernet ports, but since it’s not a development board (actually an LED array controller), the Broadcom transceiver does not have a public datasheet for it, so it’s hard to control, even though it’s using the industry-standard RGMII protocol.
Instead, we’re looking into an expansion board with the Realtek RTL8211E from Numato. It has very good documentation that should make implementation much easier:

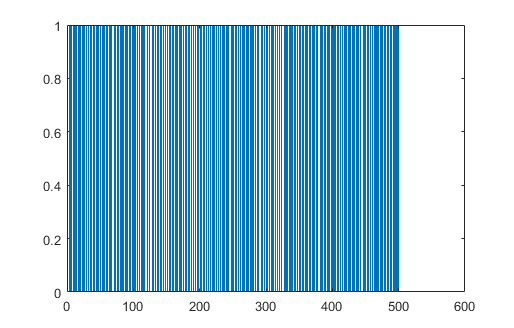
The output of the PDM microphone is a 1-bit digital signal. Even if the output is 1-bit high quality audio can be transmitted due to the fact that oversampling is occurring. For example, refer to this diagram below (Wikipedia):

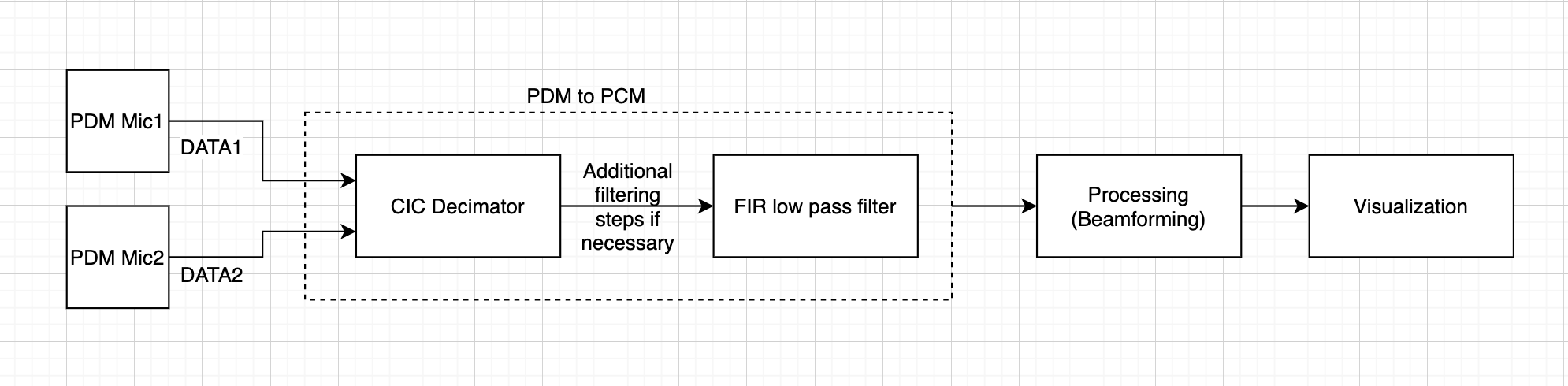
If we average (low pass filter) the PDM signal in blue, we’re able to recover the original analog signal. Implementing a low pass filter with discrete analog components is one way to recover the audio, but since we’re dealing with 96 microphones, we want the processing to be digital for greater flexibility and we don’t need ADCs as well.
If performance turns out to be an issue, we will look into more efficient low pass filter algorithms such as using cascaded integrated-comb filters.
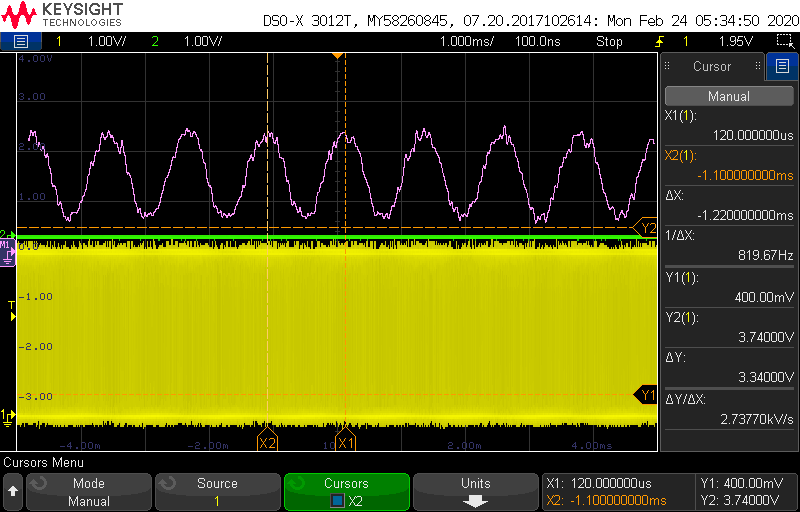
As a quick sanity check, we were able to probe the output of the PDM microphone and apply the scope’s low pass filter to get the signal back: