In the week before spring break, I started working on the TDOA code for the E2E Blink Delta Proof of Concept milestone in our Gantt chart. I spent the first half of the previous week reading, documenting, and understanding the existing Decawave API, and then the second half of that week writing my own TDOA solution. Unfortunately, my TDOA code was buggy for one reason — I completely did not think about the fact that TDOA does not use timestamps in the same way that Two-Way Ranging does, and tried to write my code using TWR’s mechanism as a baseline.
As a result, I am currently a week behind schedule. I will be using my slack time this week to remedy that and rewrite the TDOA code accordingly. Whereas previously I was trying to send the tag’s timestamp and only test on a single anchor, now I am going to rewrite the tag code to only send its ID and rewrite the anchor code to only log the time when it receives the ID pulse. I will then run this code with two anchors to check that they can both correctly receive the tag’s ID.
Luckily, the need to work with multiple anchors also dovetails into my next deliverable: Scale E2E Blink Delta Proof of Concept. This deliverable requires multiple anchors to identify the tag, which is inherently required for a functional TDOA system. As a result, I aim to accomplish both E2E Blink Delta Proof of Concept and Scale E2E Blink Delta Proof of Concept over the next week.
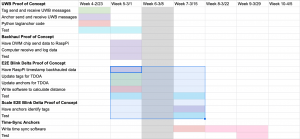
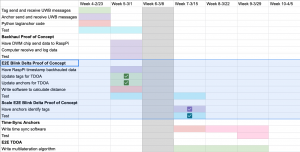
Gantt Chart: