For the first half of this week I read papers on multilateration so we could pick a paper to reference when we start writing the algorithm for our system. I narrowed it down to two possibilities, and we will choose which one to use as a group.
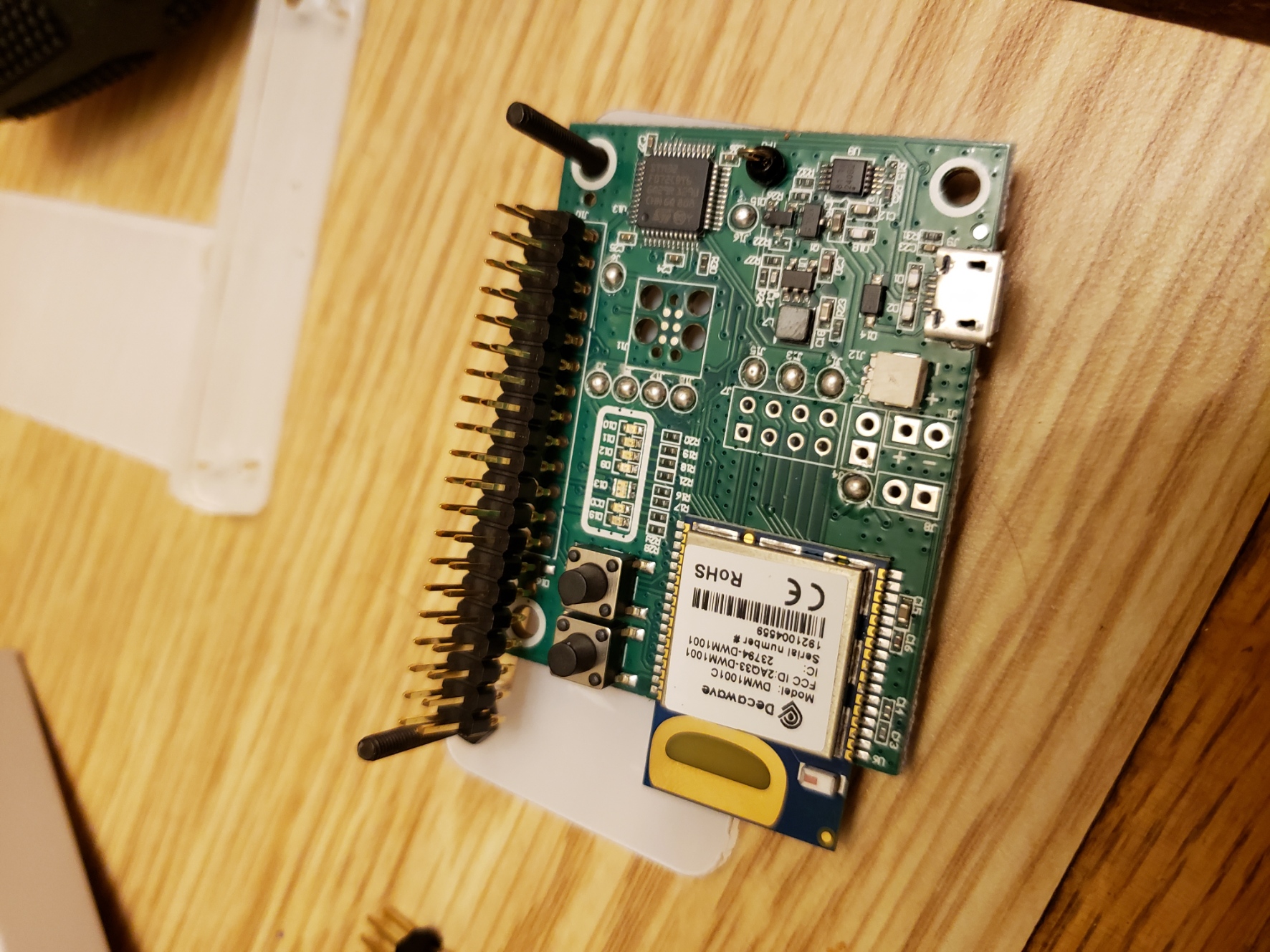
Towards the end of the week I received the solderless headers, so today I tried putting one of the headers on the chip.
The headers we got were a bit too big, so they needed snapped down to the correct size.

Once the header was snapped down to the correct size (it was one smaller than it should have been, but we’re not using the pins on the end) there was the issue of the chip not sitting flat on the acrylic, since it wasn’t long enough to have both bolts go through the holes.

So I decided to put the board on first, and then put the nut on, so the board would be a little more stable while I was hammering. It still wasn’t entirely stable since there wasn’t anything on the left side, so trying to hammer in the left side was a bit difficult.


After trying to hammer it for about an hour in various different ways on various surfaces for increased stability, the top piece of acrylic slipped. This somehow caused one of the rows of pins to be pushed further through the black thing, but not at all into the board. Once this happened I decided to reconsider how to do this and try again tomorrow.

Next week I will get a header onto a board, and get the SPI communication working. I will also work with Udit to plan how the multilateration software will be structured and start working on a portion of it.