
This week I worked on tuning the Kalman filter and the final presentation.
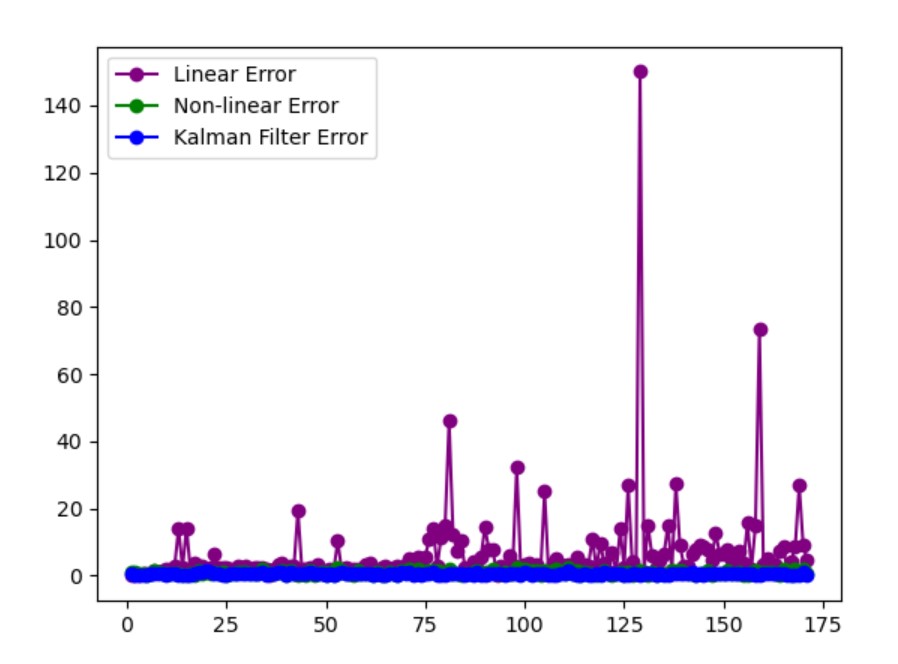
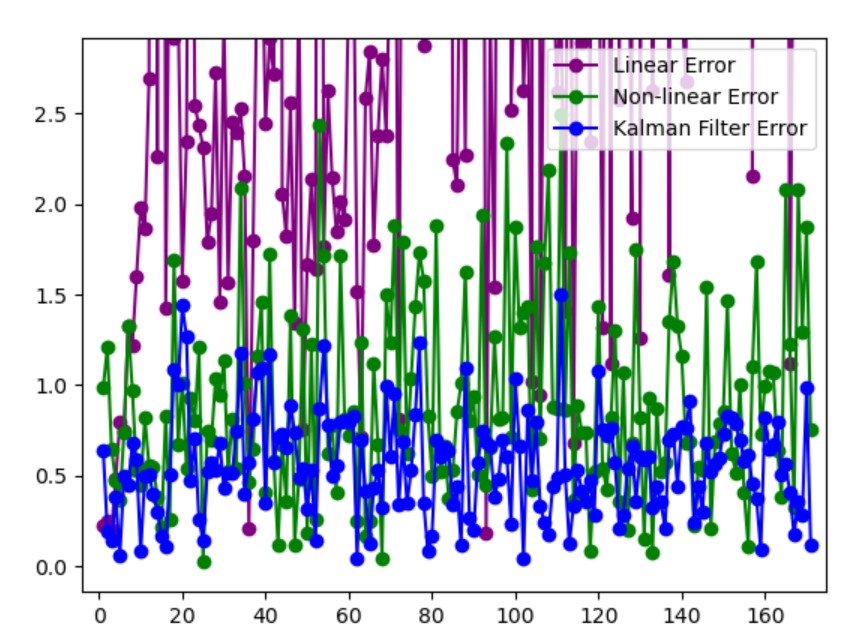
The filter performed better than the liner and non-linear localization. The RMSE for one of the runs was 15.223 m for linear, 1.065 m for non-linear, and 0.631 m for the filter.
Next week I will be working on updating the Kalman filter to work with the data sets that Udit will include in the simulation. I will probably attempt to have the predict step use the velocity of the tag, instead of using the current position.