Alex’s Status Report 4/11
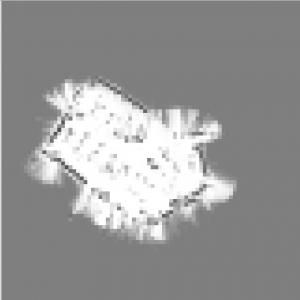
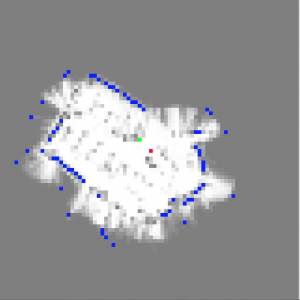
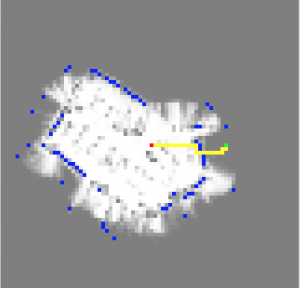
This week, most of my work was done in several work sessions with the rest of my team. I made progress on the planning & routing algorithms for the navigation module. I implemented a search that, starting from the current position, expands radially outward until it finds a suitable destination (based on exploredness). Together with Shanel’s implementation of the A* routing algorithm, we now have both components of a navigation algorithm to find a destination as well as plan a path to it. Below are some examples:
Initial Map
Plan Destination (Red is Robot, Green is Destination)
Route path to manually chosen destination (Red is Robot, Green is Destination, yellow is path)
Next week, I plan to integrate these two modules with the central robot controller, which we began working on on Friday. Our main priority right now is to complete a basic but fully-functioning version of our MVP, and then begin work on optimization, particularly the SLAM accuracy and the sophistication of the path planning algorithm.
I am quite happy with our progress so far. We lost a fair chunk of time due to some persistent hardware (?) issues with the Roomba, but otherwise are experiencing no major roadblocks.