Aditi’s Status Report for 2/29
This week, I gave a presentation on the design of our project. Later during the weekend, I helped the rest of the team create the design report document as well as set up the Roomba iCreate and the the raspberry Pi.
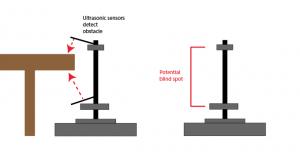
We decided that we would add more ultrasonic sensors to the robot to help it avoid bumping into obstacles like tables. I created the following diagram that illustrates this (and added it to the document):
I also updated parts of the block diagram, and created the risk management, related projects and Architecture sections of the document. I then formatted the document into the template provided
Later, I helped setup and run a basic python program on the Roomba (https://www.irobotweb.com/-/media/MainSite/PDFs/About/STEM/Create/Python_Tethered_Driving.pdf), connected the raspberry Pi to the internet and installed Kinetic ROS onto it.
We seem to be kind of ahead of schedule based on the progress we’ve made on getting the parts setup and tested. We now have basic programs running on the Raspberry Pi, Roomba, and the RPLidar, so the future of the project is looking bright.
In the next week, I hope to be able to implement some SLAM ROS packages, as well as have the raspberry pi able to control the peripherals (Roomba, Lidar and camera module).