Right now, we are prioritizing actually implementing the protocols and focusing on making sure the transactions are accurate and work. Once those portions are implemented successfully, we will begin refining our protocols and seeing which one can be better optimized. With better understanding of how error correction/detection methods, the requirements of the project should be more apparent given our better understanding of how much each protocol is capable of. We will consider what CubeRover would like for the requirements to be, but ultimately, we will use our knowledge and research to narrow down what the requirements will tentatively be by tomorrow night.
Should we not be able to determine what requirements are reasonable for our prototype, we will attempt to minimize latencies and maximize the amount of packets recoverable as best as we could. We plan to analyze each portion of our protocols to see which could be better optimized regarding time and space usage.
We didn’t make any changes to the existing design, but we did consider other designs that the professor and TA brought up. While considering other designs, it reaffirmed our beliefs and justifications regarding why we are sticking to the original design. Additionally, we added more details to the GUI’s functionality; we specified what exactly the GUI will be sending and receiving and what the communication between all components will be.
The change to the GUI was necessary to detail what we are doing and necessary to determine the best way to implements such ideas. Moreover, these details have also dictated what other components will be doing, thus affecting other implementation choices in our design as well.
No significant costs have been incurred since we are still in the Design Phase of our project. However, going back and forth between different system designs did hinder the development of the implementation detail development like which API’s and libraries to use. These costs will be mitigated by making design choices more quickly to prevent a pushback of tasks and by being able to justify and research into decisions more thoroughly.
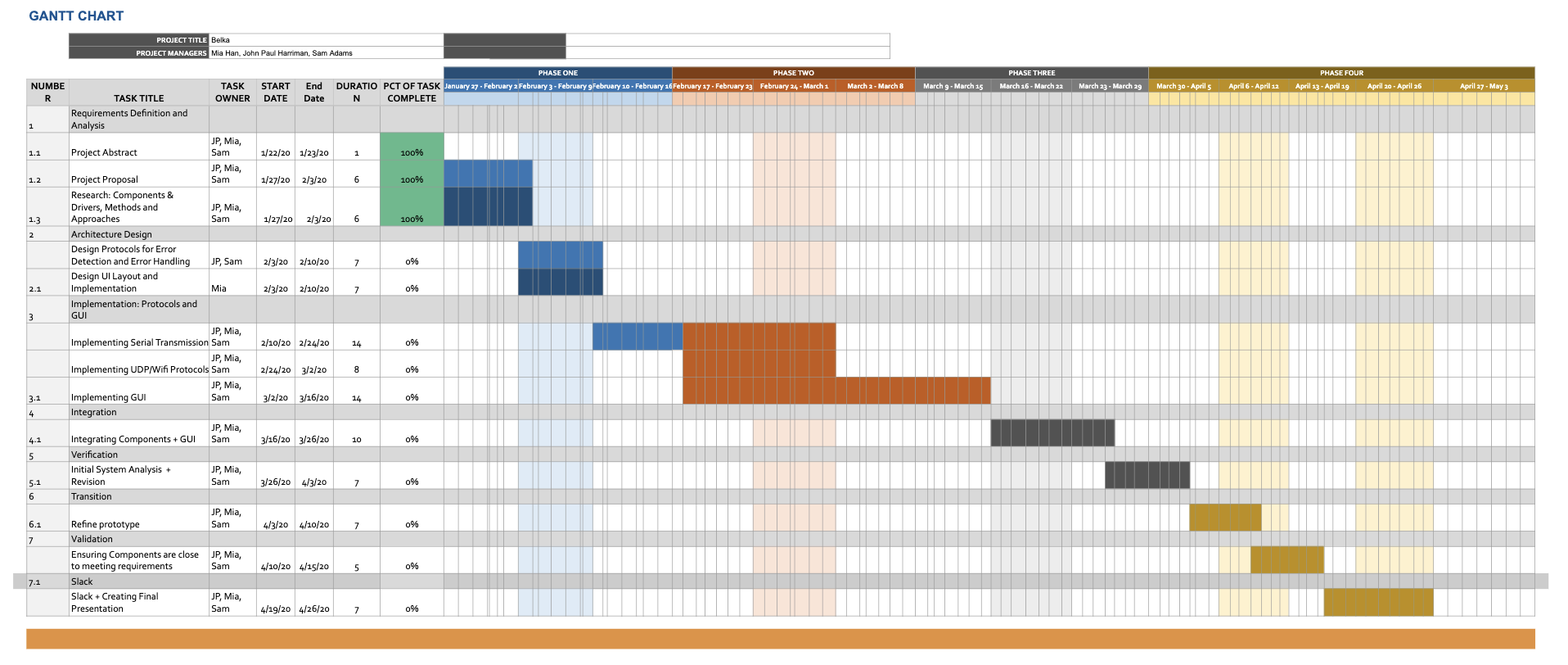
No changes have occurred; the original Gantt chart is attached.