We want to be able to create an interesting problem while still meeting the project specs of CubeRover, so we’ve decided to add more rigorous measures that will expand on the current protocols. For instance, in order for Turbo Coding to be truly effective, we must send large data such that our added computation is worth the clock cycles to run.
Another risk that could jeopardize the success of the project is the learning curve for understanding and implementing complex error detection and handling algorithms that all of us are somewhat experienced and familiar. All of us have some experience implementing error detecting and correcting algorithms for data transmission, but to achieve our goal of finding and writing the best algorithms for what we want to achieve, we may be spending an unexpected and greater amount of time implementing such algorithms.
The risks are being managed by circumventing most of our outside influence. We are planning to take the essential functions asked to be delivered by CubeRover without only working within the scope of their project. Our contingency plan is that if we do not get all necessary documentation to implement along with their specifications, then we will make the decisions ourselves on what to implement, keeping their core instructions intact. For instance, if we are unsure of whether we need to implement a small number of data packets being sent or a large number, they have different trade-offs depending on implementation, so our goal is to implement a valid solution and verification for both so that we don’t have to spend any time waiting for communication between teams.
There were changing made to the existing design because we added a different way to interface with our Microcontroller from our Computers which will be UART or USART.
This change was necessary because the current USB slot is being used for loading the program onto the microcontroller, it also adds ease of use to interface through UART.
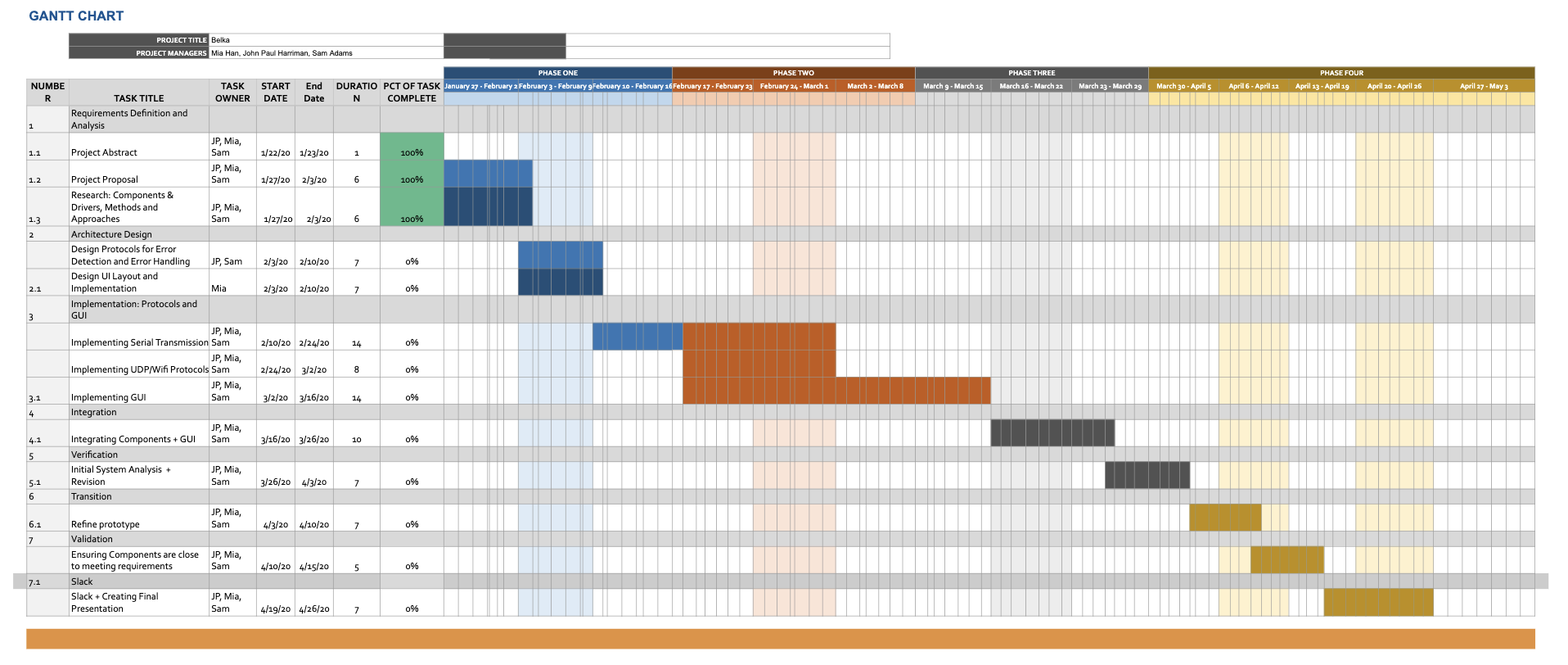
Our updated Gantt Chart parallelizes the work that we are doing so that we have more time to work on individual responsibilities while still being on schedule.