Mitchell Update 3/17-3/23
This week in 18-500
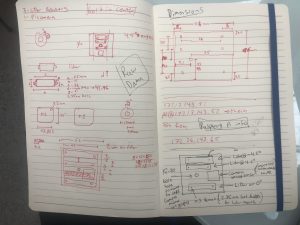
Drafting of the custom sensor mount
This will be the custom computer drafted 3-D printed plastic board that the 4 sensors will mount to, and the board will mount to the chest harness. The reason for a custom board is because of the need for precision in the relative angles of the LiDar sensors. Below is hand drafts and measurement collections for the Computer-Model. I have begun editing in Inventor Pro.
The left page is raw data measurements and drawings of the 2 form factors of sensors that will be mounted. The right top is the critical measurements between the angled planes, edges, and bolt holes. All leaving room for the 3d printing constraints. Finally, the drawing in black is just a sketch of which mounts are where on the mount and where the main bolt hole is.
RaspberryPi Configuring
As we have begun to use the Pi more in parallel I set up the Pi to work without an HDMI properly to boot to a ssh-able status without the need to use the gui interface
LiDAR Sensors
Unfortunately, the TTL converters have not arrived so we are at a standstill for testing. But I began implementing a draft of code that will be used to transform 3 LiDAR inputs into our algorithm to sense an approaching object.
Next Weeks Plan:
We are on schedule for our planned demo.
The goal will be to have the three LiDARS working in conjunction next year when the last of the parts arrive
I would also like to have the mounts 3D model completed and ready to begin 3Dprinting it
Finally, I would like to be able to input raw LiDAR data into the algorithm to produce a signal claiming an object is approaching