This week for our project, since we were just starting to get parts in, I decided to focus more on the design aspects of the project. I created the numbering scheme that we will be writing on all of our RFID tags, as well as creating our Solidworks model of the rotating card tray we’ll be dealing into.
I solidified our bit numbering scheme for our RFID tags for each playing card to make it easier to recognize each card’s bit code when we were detecting them. The last 4 bits encode the rank of the card, while the two before that encode the suit. I have attached a picture detailing the exact bit code for each card below. Once our RFID tags come in, I’ll stick them on each card and start working on writing each of their codes.
I also created a design and Solidworks model for our dealer base, which we are considering 3D-printing to produce for our project. I first drew up a diagram of the rotating base, including six trays for the cards to be dealt to (four for potential players, one for the community cards and one for the burn cards). I then made a one-sixth model on Solidworks which I then expanded into the full 360 degree part. Once we solidify how we are putting the shuffler together and dealer on top, we can easily attach this bottom part to it. It is designed so that our dealer will only have to deal in one direction, and the appropriate tray will rotate to receive each card in the proper order. I have attached photos of the one-sixth model and complete dealing tray below.
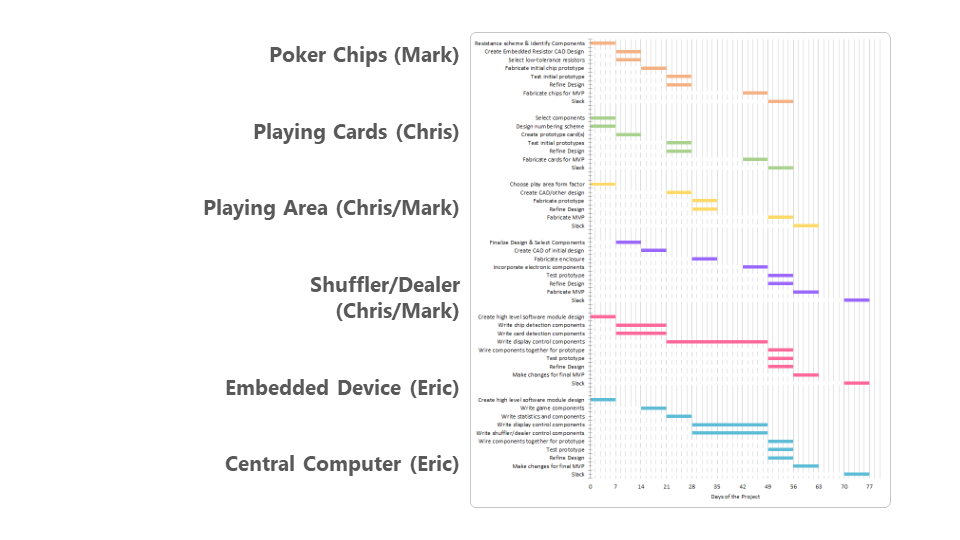
Our project is on schedule. Due to parts coming in this week, I had to move up the design of the dealer to this week, but our schedule is very flexible for what parts get done when as it is comprised of a bunch of individual parts that do not depend on each other.
Next week, since our RFID tags and reader will be in, I will focus on hooking up the RFID reader to the Raspberry Pi Zero with Eric so that we can set up the card detection once we encode each tag with the bit code we want.