After the last status update last weekend, I CADed the basic parts of the robot. Below are pictures of the CADed robot from different angles. While I was CADing the robot, I also had to figure out exactly what parts to use and do research on one part over another. I also needed to see that they all had the right dimensions to work with each other. I finished putting together all the parts orders and compiled them on a spreadsheet to order. We have three orders for parts from Andy Mark (robot specific components), Amazon and Home Depot. Serena sent them to Quinn and hopefully they arrive by next week so we can start building/prototyping our intake.
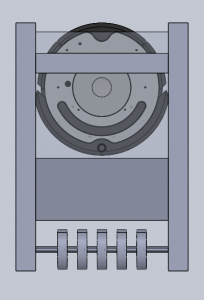
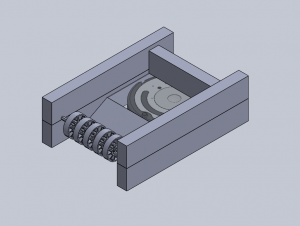
After the initial robot design and CADing, I also took Tamal’s suggestion of adding wheels to the front of the robot. These wheels will be passive wheels that will roll using a bearing as the iRobot is moving. I added the parts necessary for the wheels and mounting on the parts order as well.
I also started playing around with controlling the iRobot. We will be using a UART connection that will be plugged into the Jetson Xavier. The one provided to us with the iRobot is not suitable with the rest of our design because of how it sticks out on the side instead of the top, so we added a new wire that will make the lexan easier to mount to our parts order. We now know how to control robot movement through Python as seen in the video clip below. Overall, I believe I am back to being on track overall and feel good about the robot design coming together.
0 Comments