These past two weeks I finished the entire hardware and construction for the robot. I mounted the battery with a motor mount and mounted it to the side plank with a motor after measuring out where exactly the connection should go. I ordered a motor key that allowed me to attach the motor to the half inch hex with a shaft collar.
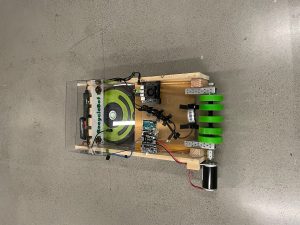
Then we all figured out the placements of the batteries and electrical components. I added extra wood and a lexan backing to hold the two batteries in the back of the robot. This made the weight more evenly distributed in the structure. We also placed all the hardware on the lexan plate in the front and velcroed everything. Additionally I placed all the wires and zip tied the wires to make everything neater. Also, Serena and I looked for a 3D printed clasp to hold the Intel Realsense camera. Serena designed one using website and got it printed using the Tech Spark printers. Afterwards I hand sawed holes in the 3D printed part in order to plug the type 3 cord into the Intel Realsense camera.
Additionally, the ramp was hitting the ground and sometimes inhibited the robot from moving. So I removed the lexan holding the hardware and lifted and adjusted the ramp so it wouldn’t hit the ground and still be at enough of an angle to intake the bottles.
After that we all worked on testing the robot to produce metrics. Overall, I finished the construction and controls for the motor and am working with Serena and Mae to test the robot. I am also working on the final presentation and will get ready to present it this week.

0 Comments