
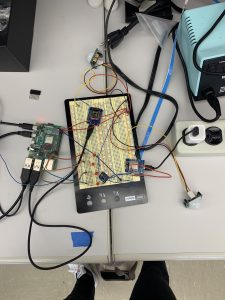
This week Ryan and I worked on testing receiving input data from two different microcontrollers connected to different sensors. In the picture below you will see the two microcontrollers both sending data being received from two opposite facing PIR sensors. Next week, we need to make sure that the IDs of the microcontrollers are recognized by the base station.
I worked on looking for new microphones and ordering them. We ordered three types of microphones. Amongst these microphones, we have another copy of the previous type microphone in case the lack of signal (even after soldering) was due to a defect. We will test them early next week.
I also worked on writing a threading script in python that works with simulated sensor data. Based on incoming sensor values, the thread corresponding to a work station modifies the work station’s score.
I implemented this in code:


The code works, but the score values are random, so next week I want figure out a logic behind the score constants and timeout constants. I also want to have some idea of potential microphone thresholds from the new microphones we have ordered. In addition, I want to talk through the web app with Malavika to figure out what other inputs the base station’s code needs to account for.