This week we spent a lot of time debugging our system in preparation for the demo. During the process of getting the IR sensor to work with the Nano, we noticed that the Nano’s I2C bus has some issues detecting connections from the sensor and the Nucleo board as well. We were able to confirm that the Nano is able to read bytes from the sensor’s I2C connection. However, we’re still in the process of debugging the I2C connection between the Nano and the Nucleo board. If we are unable to resolve this issue, we will consider using an alternative communication protocol that is supported by the Nano and the board such as UART or SPI.
After figuring out the I2C connection between the Nano and the IR sensor, we were able to execute a program that reads and outputs temperature data from the IR sensor every 0.5 seconds. We can simply integrate this script with the other script that was sending hard-coded data to the cloud gateway to finish up the temperature sensing functionality. Here’s a quick video of the temperature sensor working:
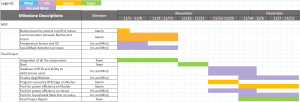
We also modified our work schedule. We noticed that the complexity of deploying the face/mask detection algorithm on the Nano is a lot more than we expected. So Iris and Minji will work on Nano’s face/mask detection algorithm and temperature sensing process together. After those functionalities are up and running, we will implement the web application together toward the second half of the remaining weeks. We came to this conclusion because we decided that our priority should be on fully implementing the system’s functionalities.