By
Marios Savvides
Kiran Bhat
Abstract
We have implemented a real time video morphing system using feature
points on the images. Our method uses morphing for motion compensation
instead of the standard block based techniques. The input to our system
can be a stored video sequence or live video data from a camera. The system
automatically selects and tracks feature points in the video stream using
the KLT feature tracking algorithm. The number of feature points to be
tracked can be controlled by the user. The feature tracker works in realtime
at around 3 Hz (on a Pentium 300). The motion vectors of the feature points
is passed on to the morphing algorithm. Our current morphing system produces
one intermediate morphed image for every two successive "feature-tracked
image". The morphing algorithm uses the motion vectors of the nearest feature
point for texture mapping. Though simple to implement, this morphing algorithm
is not very computationally efficient. The overall system works at
1Hz, which can be improved to around 3Hz (feature tracker frame rate)
using a standard triangulation methods combined with scanline algorithms
for morphing. This system has numerous applications including video-conferencing
and net video.
KLT Feature Tracking Method
Feature tracking is a widely researched topic in the Computer Vision
community. The most commonly used methods for feature tracking employ image
correlation or sum of squared difference (SSD) techniques. With small inter-frame
displacements, a window can be tracked by optimising some matching criterion
with respect to translation and linear image deformation.
Our current system tracks features in the image based on the method
proposed by Tomasi.et.al (KLT system). The KLT (Kanade Lucas Tomasi) feature
tracking system identifies and tracks features by monitoring a measure
of feature dissimilarity (that quantifies the change of appearance of a
feature between the previous and current frame).
Features with good texture (instead of the traditional "interest"
or "cornerness" measures) are selected and are tracked using an affine
tracking model, which can account/compensate for translation and linear
warping. The affine model is computed numerically using Newton Raphson
minimization technique. Translation gives more reliable results than affine
changes when the inter-frame motion is small, but affine changes are necessary
to compare frames with large motions to determine dissimilarity. We tested
the tracker on a few face sequences and observed that features which were
identified were tracked satisfactory. The feature tracker works in realtime
at around 3Hz.
The Morphing Algorithm
We have implmented a very simple algorithm for morphing the intermediate
frame from the current and previous images of the videostream. We look
at all the tracked feature points in the current image, and find their
corresponding positions in the previous image. Using this information,
we can compute the motion vectors of all the feature points in the current
image. Then, for each pixel (ix, iy) in the current image, we find its
closest feature vector and assign that motion vector (mv_x, mv_y) to the
pixel. For each pixel (ix, iy) in the current image, we move to the pixel
location (ix-mv_x/2,iy-mv_y/2) in the intermediate image, and assign
its value equal to 0.5*(val[ix, iy] + val[ix - mv_x, iy - mv_y]). Note
here that (ix-mv_x, iy-mv_y) indicates the position of the corresponding
pixel in the previous image.
We note here that even though this algorithm is simple and produces
the desired morphing effect, it is slow since we are processing pixel by
pixel. We employ a few tricks at the pixels in the background (like skipping
every 24 pixels if the distance to the nearest feature point is greater
than a particular threshold) to improve the morphing speed.
System Description
Our system comprises of a Pentium 300 with an MRT framegrabber
card and a Sony Camcoder .
We have modified the KLT routines (from Stanford Robotics Lab) and
implemented the morphing algorithm to produce a visual testing framework.
GUI
-
Choice of loading from the camera or from 5 stored video streams (faces,
people walking etc).
-
Image display of base frame(image when feature tracker replaces lost features)
-
Image display of current frame ( for comparison between the two).
-
Image display of the morphed image (Final).
-
Image display of the intermediate morphed image (before filling the gaps).
-
Image display of the averaged image (by averaging the current and
previous frames).
(This is displayed to compare with the final morphed image.)
-
Automatic frame-by-frame feature tracking (500ms timed update interval).
-
Manual step-through feature tracking process.
-
Ability to specify the number of features to be found and tracked through
a sequence.
-
Ability to specify the number of frames to elapse before replacing lost
features.
-
Number of features succesfully tracked in the current frame (relative to
features in base frame).
-
Implemented user-friendly/program safe- interface (ie. depending on user
action, GUI disables un-available options controls to avoid user
from performing an illegal action like pressing Load Stream 2 button while
in auto mode viewing video stream 1. Using this method, the GUI directs
the user to what options are valid at each moment during the execution
of the program.
Results and Future Work
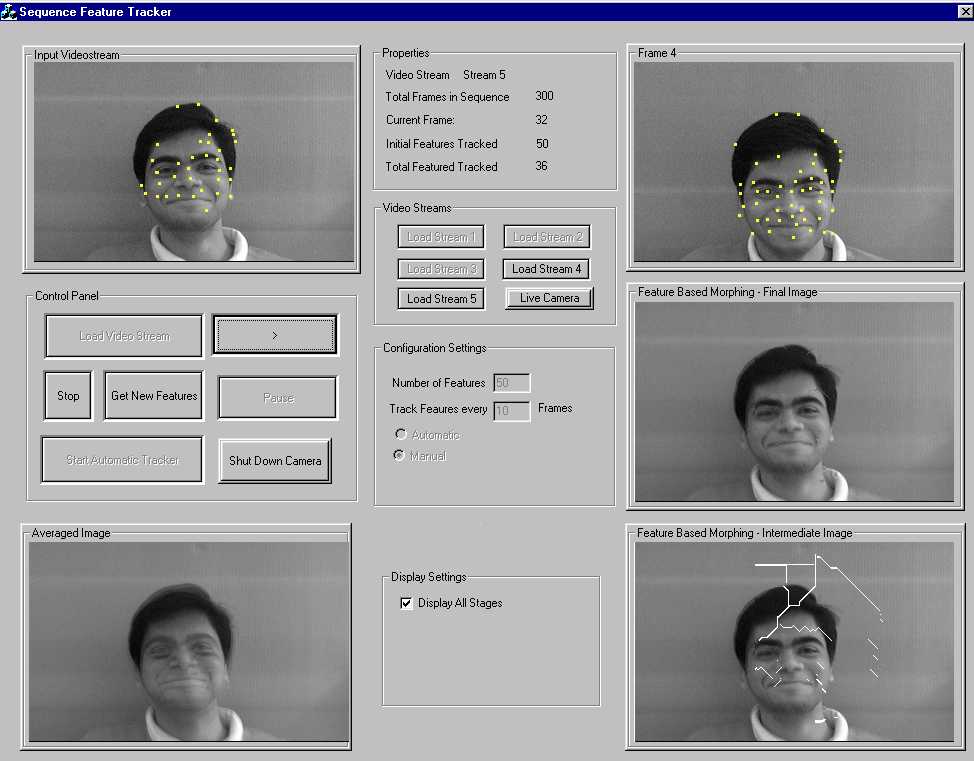
The following snapshot illustrates the performance of our feature based
morphing system. The top left image shows the current frame of the video
stream, the top right image is offset from the current image by 10 frames
(the frame when the features were replaced previously). The center image
shows the final morphed image, the bottom right shows the intermediate
morphed image and the bottom left shows the averaged image. From these
images it is clear that feature points are tracked temporally, and the
quality of the morphed image is comparable to the input image (for small
motions). We also note that the quality of the morphed image is much superior
to the average image.
We found that the feature tracker works at around 3-4 Hz, and the overall
system works at around 1Hz. We can improve the speed of the feature tracker
by selectively choosing feature points on the foreground object. The morphing
algorithm can be improved by obtaining the voronoi regions prior to texture
mapping of each pixel. This system has numerous commercial applications
and is also a good testbed for testing various advanced computer vision
& image processing algorithms.
References
1) Shi. J and C. Tomasi, "Good Features to Track", IEEE Conf. Comp
Vision & Pattern Recog. (CVPR 94) Seattle, June 1994.
2) CMU Computer Vision home page.
3) Beier. T and S. Neely, "Feature -Based Image Metamorphosis", Computer
Graphics (SIGGRAPH), 26, 2, July 1992.
4) Wolberg. G, "Digital Image Warping", IEEE Computer Society Press
Monograph, 1988.
5) Prosise. J, "Programming Windows 95 with MFC", Microsoft Press,
1996.
6) Petzold. C, "Programming Windows - fifth edition", Microsoft Press,
1999.
Link to our code