Competitive Analysis
click the image to view the website
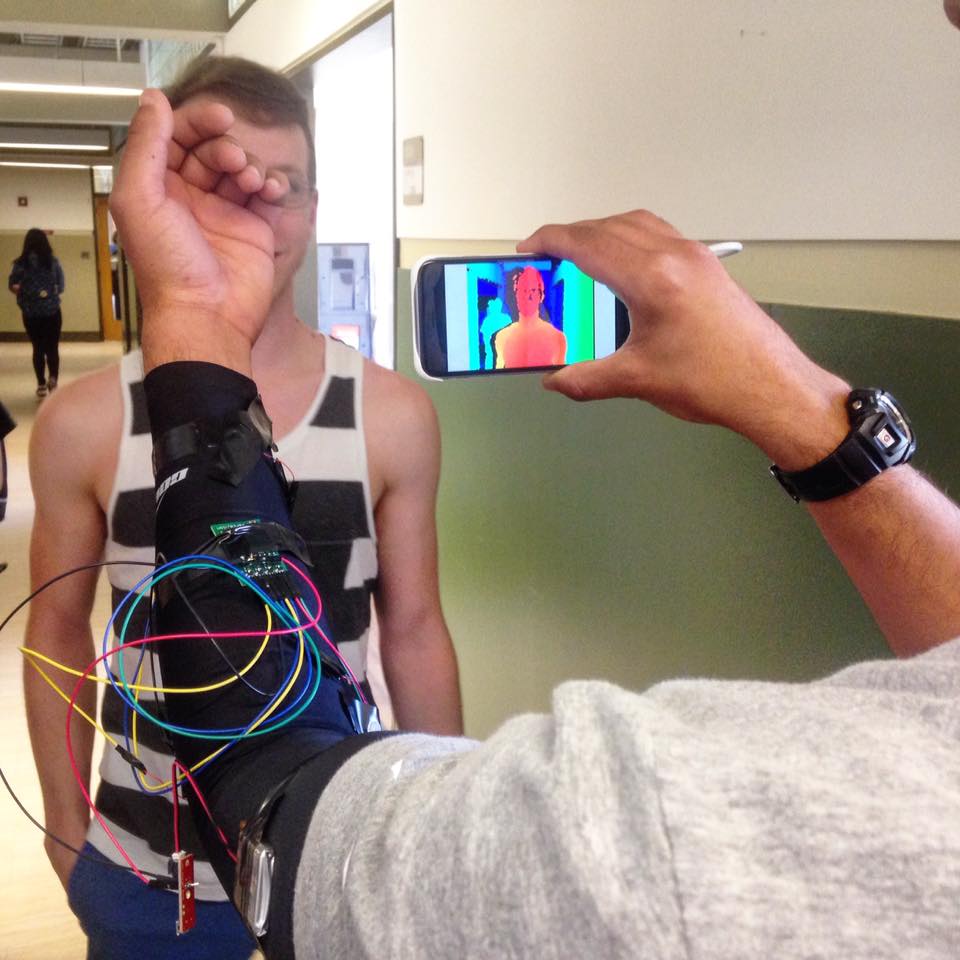
Perception
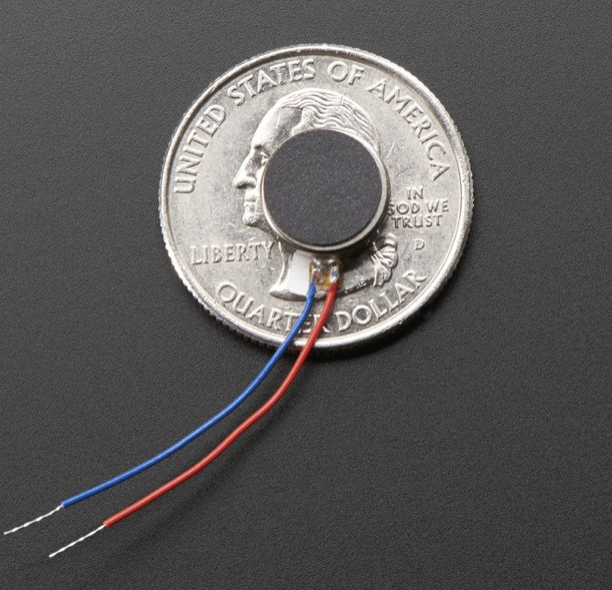
Perception uses depth sensor with haptic feedback to solve obstacle detection.
Opsis provides better user experience by eliminating unnecessary movements during obstacle detection.

Ultracane
Ultra Cane uses ultrasonic sensors to detect an area around the tip of the cane.
Opsis provides much better precision and better user experience because Opsis utilizes much more vibration sensors with large FOV.