the gist of it
With a name derived from the Japanese word for stagehands, Kuroko is a prototype system of robots
aimed at automating the movement of various objects within a space such as a theater, office, or home.
Each object that needs to be mobile has a dedicated, reasonably inexpensive robot attached to its base.
Together, this collection creates a powerful, coordinated network of nodes that a user can manipulate to
a configuration of choice.
why we're doing this
Several hours of manpower are often needed trying to rearrange the chairs
in a large auditorium, office, or restaurant at the end of a day. The cost of employing stagehands for a
production
company running several shows each weekend can often get prohibitively expensive. So we thought we'd
make
things
that can replace manual labor for such tasks cheaply and accurately. Such a coordinated collection of
robots
can find application in several other fields as well. So, why wouldn't we do it?
who we are
We're a group of seniors who are really excited to create Kuroko. We're having a blast while working, too.
While Dhaval gets hungry unusually often and Alex and Taylor fight over code style, Nidhi plays pacifier
and glues the whole team together. Clearly, we're a very balanced team.
-

Dhaval Shah, ECE
-

Taylor Womack, ECE
-

Nidhi Doshi, ECE&Physics
-

Alex Battaglia, ECE&CS
the tech specs
Requirements
- The bot must be able to safely navigate obstacles to reach a given location.
- The interface (most likely a responsive web-app) must be informative as well as user-friendly.
- The bots must move around at a speed quick enough to not render themselves obsolete.
- The bot movement must result in very good final-position accuracy for all involved nodes.
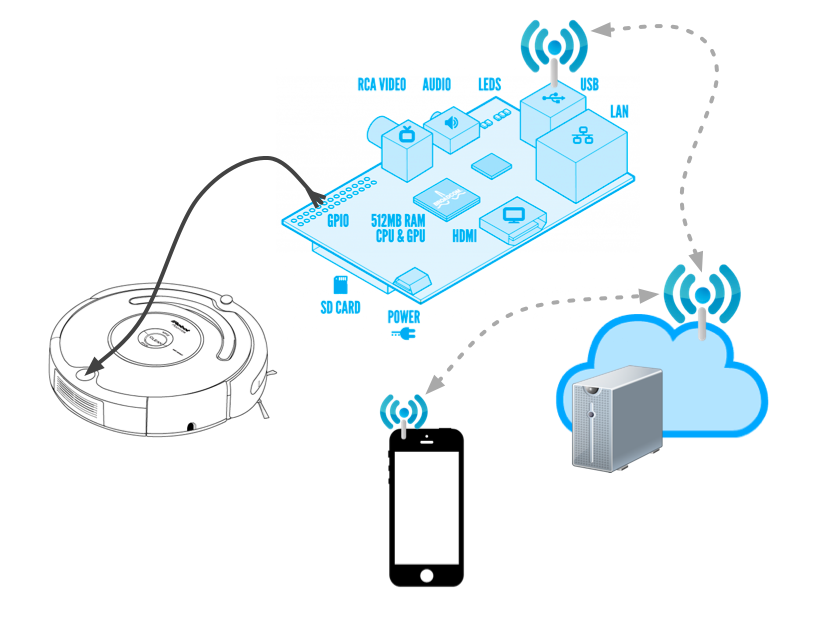
We are using an iRobot Create, combined with a Raspberry Pi, to move the object. When a user manipulates the set-up on a web-app,
the signal is sent to a central server over Wifi, which forwards this to processors
equipped with Edimax WiFi modules on the appropriate robots.
Each node is clever enough to maneuver without continuously contacting the server. On reaching their destinations, they relay a message of success back to
the server.
tackling the risks
| Risk | Fix |
|---|---|
| iRobot motors too weak to drag a chair | Lighter chairs, or switch to stage props |
| Raspberry Pi + iRobot draw too much power | Invest in a battery pack to exclusively power the Pi |
| iRobot movement lacks accuracy | Use additional/better sensors to serve as a guide |
| iRobots lack coordination with each other | Fall back from parallel to sequential motion |
| Difficult to avoid or circumvent obstacles | Use global-room sensing to see the full picture |
competition
It turns out we're actually quite unique in terms of our vision of applying this concept to several
possible use cases. Considering each one individually, there are some specialists that exist in the market.
Creative Conners is a company that specializes in scenic automation for plays, but they provide extremely specialized equipment without the flexibility Kuroko offers, and begin at a hefty licensing fee of $995.
Other than that, our primary competitor is manual labor, because the problems of re-arrangement of objects, such as chairs in offices or concert halls, haven't quite been automated at all. To illustrate the potential of replacing repetitive work with Kuroko, take a look at the time lapse of an ordinary 120 hours at the Interlochen Academy's Kresge auditorium.
Creative Conners is a company that specializes in scenic automation for plays, but they provide extremely specialized equipment without the flexibility Kuroko offers, and begin at a hefty licensing fee of $995.
Other than that, our primary competitor is manual labor, because the problems of re-arrangement of objects, such as chairs in offices or concert halls, haven't quite been automated at all. To illustrate the potential of replacing repetitive work with Kuroko, take a look at the time lapse of an ordinary 120 hours at the Interlochen Academy's Kresge auditorium.
track our progress
Visit our and keep up.