r o v a
ball pickup tests
| #22 | | | collab | | | 5.5.2018 |
ball pickup tests
| #21 | | | collab | | | 5.5.2018 |
ball pickup tests
| #20 | | | collab | | | 5.5.2018 |
pickup mechanism with 3D-printed parts and mounted on the car
| #19 | | | nom nom | | | 5.3.2018 |
testing Canny edge detection
| #18 | | | openCV | | | 5.3.2018 |
testing strict thresholding
| #17 | | | openCV | | | 5.3.2018 |
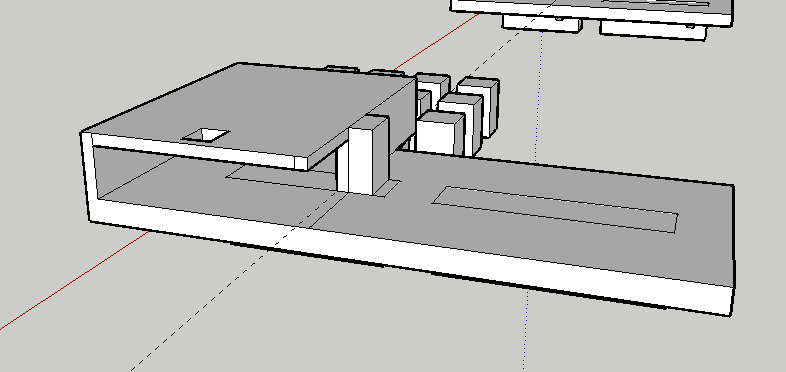
a blueprint of the ball pick-up mechanism.
| #16 | | | misc | | | 4.26.2018 |
pickup mechanism with new motor and less smoke
| #15 | | | nom nom | | | 4.26.2018 |
FSM test with turning and tackle (a WIP pickup command)
| #14 | | | vroom x OpenCV | | | 4.12.2018 |
testing distance calculation
| #13 | | | OpenCV | | | 4.12.2018 |
four 90 degree n-point turns to create an "in-place-turning" substitute
| #12 | | | vroom vroom | | | 4.12.2018 |
SSH-controlled car
| #11 | | | vroom vroom | | | 4.5.2018 |
our water-wheel pickup mechanism attached to our weaker motor
| #10 | | | nom nom | | | 4.5.2018 |
testing PWM with our weaker motor
| #9 | | | nom nom | | | 4.5.2018 |
a prototype of our pick-up mechanism
| #8 | | | nom nom | | | 3.29.2018 |
testing a basic FSM
| #7 | | | vroom vroom | | | 3.29.2018 |
here's the RC car responding to PWM steering instructions. unfortunately, the servo's neutral position is quite offset.
| #6 | | | vroom vroom | | | 3.22.2018 |
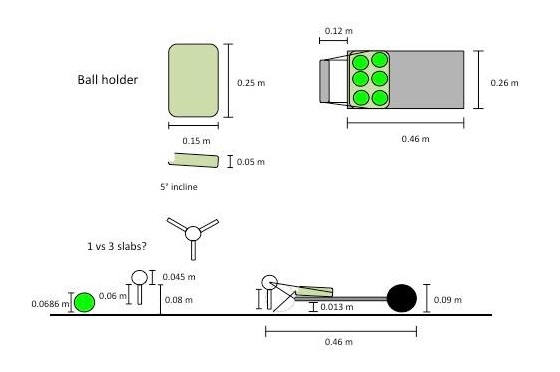
a blueprint of the ball pick-up mechanism.
| #5 | | | nom nom | | | 3.22.2018 |
we gave an overview of our setup and managed to arm the ESC.
| #4 | | | vroom x openCV | | | 3.22.2018 |
we couldn't arm the ESC, so we tried sending PWM signals after the transmitter did the arming for us.
| #3 | | | vroom vroom | | | 3.8.2018 |
better tennis ball detection thanks to the presence of sunlight.
| #2 | | | openCV | | | 3.8.2018 |
first attempt at tennis ball detection in a room with poor lighting and no sunlight.
| #1 | | | openCV | | | 3.8.2018 |