Risks:
Lower accuracy than anticipated, but no large risks!
Changes:
Changed our algorithm for how we are doing downward stairs detection.
Unit Tests and Overall System:
I will list the test followed by the findings we had from each test:
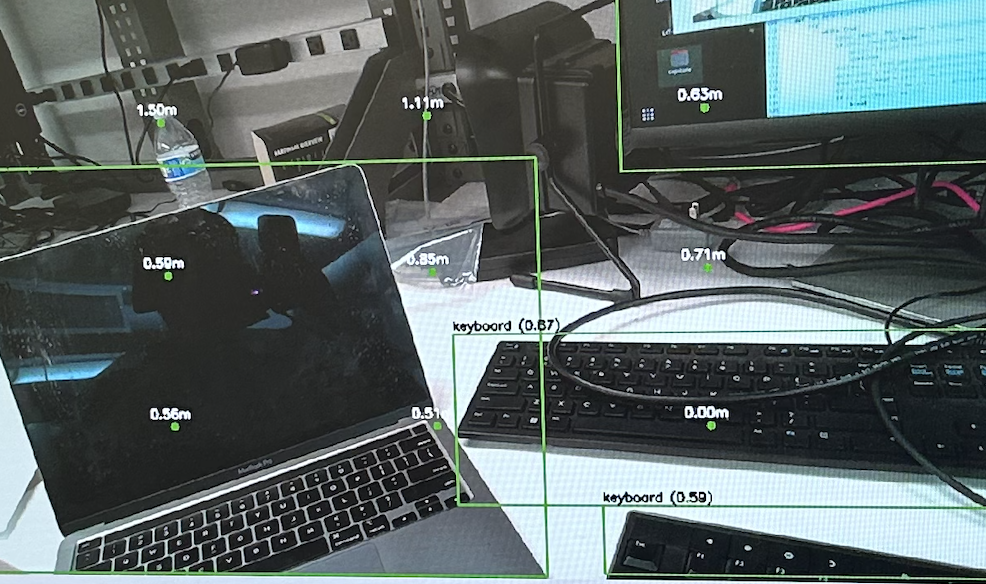
Object Detection –> Pretty solid all around. We tightened up the range that we accept objects so that it will only detect objects in a shorter range.
Steps –> With data augmentation, our model is very accurate in dim/weird angle areas.
Wall Test –> Mainly very accurate, only inaccurate on slanted walls where the closer wall is in a distance hole (distance of 0).
FSR -> mainly accurate, only inaccurate on carpets
Haptics –> completely accurate
Integration –> mainly accurate, only inaccurate on moments where there is a person on the stairs.