- This week, I worked on testing more hardware components. The new motor driver was delivered, but broke, prompting us to wait for a replacement for a couple of days. After the replacement came in, we tested it with the stepper motor and rotation works (we have some concerns about the strength of the motor but further testing is required).
- I also tested the NRF24L01 wireless transceivers, and was able to get the transmission of strings to work, which will form the basis of our wireless commands.
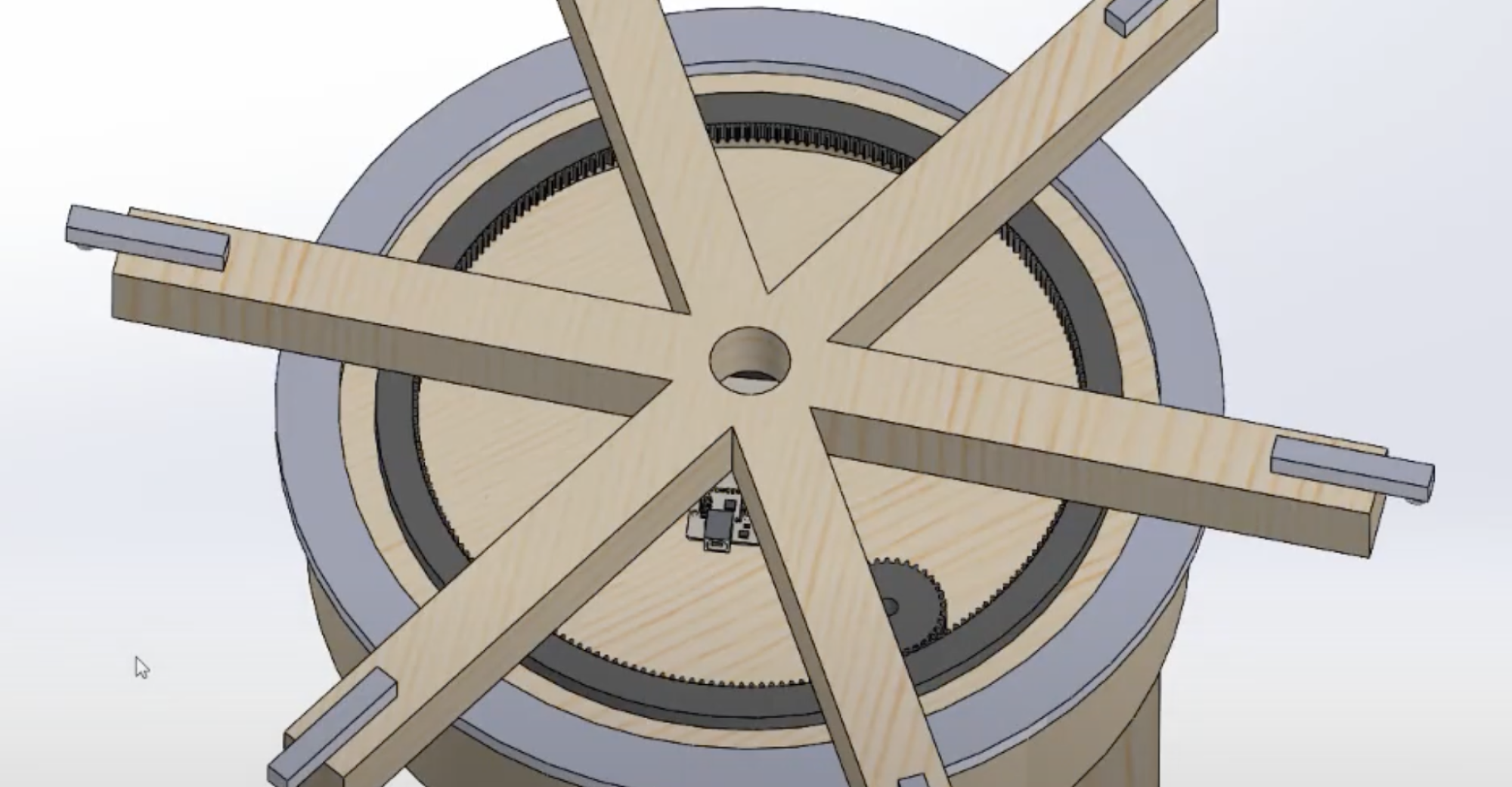
- After the rest of the components were tested, I attached all the load cells permanently to the stand. Next, I started on the final Arduino code that would be needed to parse wireless commands and control components on the item stand.
- According to the gantt charge, I am slightly behind schedule, due to my underestimation of the complexity of getting some components to work. The entire next week was originally dedicated to end to end testing, but at least half of that time will be working on the final Arduino code and testing motor strength with weights. I have been putting about 15+ hours of work into the project each week since the start so I believe I will catch up by next week (the gantt chart was a bit optimistic for the stage of “putting everything together”).
- Next week, I plan to test out motor strength and rotation, and finish writing the final code for the Arduino before we screw the last few bolts in.
Carnegie Mellon ECE Capstone, Spring 2024 | Doreen Valmyr, Ryan Lin, Surafel Tsadik