What are the most significant risks that could jeopardize the success of the project? How are these risks being managed? What contingency plans are ready?
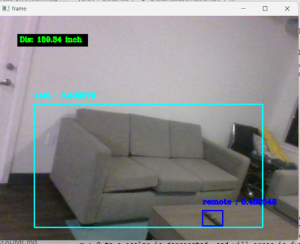
- Yolov4 OR model: A step back from yolov9 to yolov4 has been decided to incorporate the DE feature due to yolov5~9’s incapability of manipulating the detected output data unlike yolov4. Because training the model is not possible for yolov4, a risk of not being able to focus on indoor objects may arise. However, after some research, a pre-trained model uses MS COCO, which has 330K images with 1.5 million object instances, 80 object categories. This is a much better annotated dataset compared to what we could find online, which has 640 images. Therefore, it makes sense to use the pre-trained model. It is also possible to filter out the specific outdoor objects, such as a car or a bus, in the DE feature, so we can still focus on indoor objects.
- PCB Assembly: Due to some delay in the receiving of transistors for the PCB assembly, we have been set back by 1 week as Meera had to wait on fixing the PCB for a first-round of testing. We aim to get a first version of the PCB ready in the first half of the coming week but this 1-week delay will certainly be cutting into the time we allocated to testing and modifying the current design and re-ordering a new PCB if necessary. The contingency plan is now to get the first iteration of the PCB ready as quickly as possible and work on testing.
Were any changes made to the existing design of the system (requirements, block diagram, system spec, etc)? Why was this change necessary, what costs does the change incur, and how will these costs be mitigated going forward?
- A change from yolov9 to yolov4 has been decided in our software module. Considering that the test setting will be in a well-lit indoor environment with few indoor objects, it is expected that the accuracy drop from yolov9 to yolov4 will not significantly impact the project.
Provide an updated schedule if changes have occurred.
There has been a change in my (Shakthi’s) work schedule. I decided to move working on the speech module till after the implementation of the vibration module as the vibration module had a shorter end-to-end data flow and required a lot of the same processing of data as the speech module does. Now that I’ve completed the first iteration of the vibration module, I will be going back to finish up the speech module and work on its integration with the rest of the system.

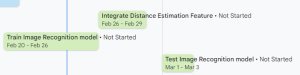
There also has been a change in the work schedule for the OR model. Because we are using Yolov4 with the DE feature, the schedule has been adjusted accordingly. The testing stage has been pushed back by a week.

Due to the delays in getting the transistors, the hardware development schedule has also been pushed back until we get the transistors this week.