
Accomplishment:
I have worked on trying to integrate a DE feature to Yolov9, but it was unsuccessful. I have noticed that the recent versions of the OR model restrict our abilities to manipulate with the detected output, which prevents us from using the data to detect the distance.
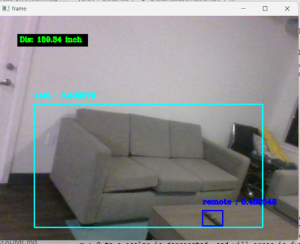
Therefore, I decided to step back to Yolov4 with the DE feature considering the time constraint on the project. The current open source library only has the DE feature for a person and a mobile phone. To test my understanding of the source, I have added several reference images and measured the distance of the width of a sofa to detect the distance. As shown in the screenshot of the running model, the distance is shown along with the detected object.
The accuracy of the distance will be improved by taking a reference image from a constant known value, which will be the distance between the object and the camera.
Progress
Because we are stepping back to Yolov4 with the DE feature, I am catching up with the progress. I still need to add reference images of several more indoor objects to test out the DE feature.
Projected Deliverables
By next week, I will add bench, cat, dog, backpack, handbag, suitcase, bottle, wine glass, cup, fork, knife, spoon, bowl, chair, sofa, potted plant, bed, dining table, tv monitor, laptop, mouse, keyboard, cell phone, microwave, oven, toaster, sink, refrigerator, book, scissors to the DE feature. I will also finish up the testing and begin to work on deploying the model to Nvidia Jetson. It will be a long week to prepare for the interim demo and ensure that the model runs in the Jetson well.