What are the most significant risks that could jeopardize the success of the project? How are these risks being managed? What contingency plans are ready?
- This week we connected the camera module to the Jetson and captured a few images. The camera lens causes a slight distortion to the image, and the images are lower resolution compared to the laptop camera we have been using to test the OR model. A risk associated with this is that we may experience lower accuracy of the model, and we may have to mitigate this by processing the images before sending them to the OR model.
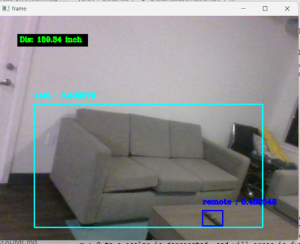
- The accuracy of the DE of a detected object is a risk that we are currently facing. Although we can successfully determine which object is closer to the camera, the numerical value of the distance in meters is inaccurate. This is due to the difference in the width of the chair in the lab and from the reference image. This inaccuracy does not impact the output of the model as much, but it is an undeniable factor to the accuracy of the DE feature. We are planning to mitigate this risk by taking the reference images of the objects that we will be using for the test environment. In this way, we are able to make the width of the respective indoor objects the same (i.e. all chairs have the same width, all sofas have the same width, etc.).
Were any changes made to the existing design of the system (requirements, block diagram, system spec, etc)? Why was this change necessary, what costs does the change incur, and how will these costs be mitigated going forward?
There was one change from the design of the system. The OR model will use Yolov5 instead of Yolov4. This change is to increase the accuracy and improve the data latency of the model. Although it took more development time than necessary to program the DE feature, the result will have a better yield.
Provide an updated schedule if changes have occurred.
Few more relevant objects will be added to the DE feature. The deployment of the OR model on Jetson will begin next week.
Here is our update Gantt Chart as of Interim Demo (4/1/2024):