
This week, I got a good amount of work done. First, I wrapped up the arduino code and was able to control four motors given a string of the format “[motorID1]:[direction1]:[degrees1]&[motorID2]:[direction2]:[degrees2]&…”. I tested the serial communication between python code that simulated Bhav’s end, and was able to simultaneously control four motors given these commands. I am unfortunately missing a few small screws to attach the cameras to the servo brackets, but I did attach the servo brackets to the servos. To finalize building the camera stands, I will be looking for these screws, as well as some form of base to stabilize the motors.
I am mostly back on schedule. With the Arduino code finished, the only part I am behind on is building the camera stand, but that is in progress.
Next week, I hope to have the camera stands finished. I also will try to work on integrating this code with OpenCV’s boundary box output instead of my simulated python code.
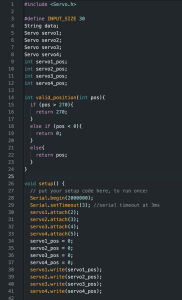

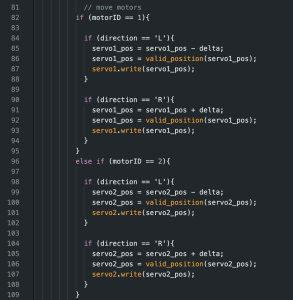
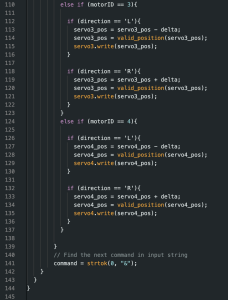
(sorry for the blurry code, I can’t seem to find a workaround.)