
The most significant risk that could jeopardize our project currently is still color detection failures. This wasn’t able to be resolved yet. To mitigate this, we’ve been trying to work in good lighting and selecting our object of interest very carefully to get the correct colors. Another risk that we need to manage is scaling up our system. As we include more cameras, our feed selection algorithm is prone to be more difficult. The increase in overlap of the footages may mean that there are more options for feed selection. To mitigate this, we are currently in progress of incorporating the rate of change of bounding box sizes to our algorithm. We also wish to look into direction findings of the car.
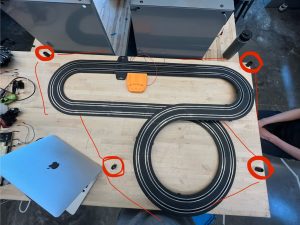
We finally changed our track to the one we will be demoing. We wanted to incorporate a loop and an elevation change. We think this track would be simple, yet very telling of the capability of our system. We plan to use four cameras and locate them as shown on the picture. Other than this, our design is pretty much the same, just scaled up
Our schedule has not changed.