
This week, I continued improving the accuracy and fine tuning the physics model. I also helped out with some of the testing and verification methods for projecting the ball onto the table to verify its accuracy.
When projecting the output line onto the screen, I realized that there was a flaw in my wall detection model – I was not accounting for the ball radius when accounting for the ball bouncing back against the wall. The reflection against the wall assumed that the ball center was performing a reflection against the wall, where in fact, it should have been the surface of the ball. To rectify this, I shifted all the walls towards the center of the table by the cue ball’s radius and re-performed more accurate calculations from there. This returned the correct location that the cue ball was bouncing off the wall.
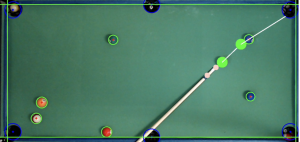
This week, I also began making preparations for the verification phase. I wrote code to project the ball’s predicted location onto the screen. Our eventual goal later on is to verify the predicted location with the actual location that the cue ball ends up hitting another ball. We will measure this difference and this should give us an idea of how accurate our prediction model is. This can be seen in the photo below:
In total, the physics subsystem will need to verify two things. Firstly, we will have to make sure the distance between the predicted ball center and the actual ball center of the cue ball hitting the first ball is off by less than 0.2inches. The next thing that we will have to measure is that the angular difference between the predicted ball trajectory and the actual trajectory is less than 2 degrees. In order to perform these two verifications, we intend to execute 10 shots and take a recording of these shots. We will then verify from the recordings of the actual location of the cue ball hitting one of the other balls. We will manually measure the difference from the video and scale it according to the table’s size to get the actual distance error. To verify the angular difference, we will use a ball tracking software that shows the difference in the angle of their trajectories. We will calculate the average error across the ten shots.
This week, as our trajectory output has not been fully stable yet, I only visually inspected that the ball is moving along the correct trajectory by taking a couple of shots. We also took some videos to visually verify that the ball should at least be hitting close to the location that we predicted it to be. Once we improve the stability of our ball and trajectory outputs, we intend to conduct a second round of verification testing that is more accurate as described in the paragraph above.
Having completed the first round of visual testing this week, I am currently on track for whatever I wanted to accomplish. I am still not fully satisfied by the instability of the ball prediction output trajectory line, but our team is working very hard to find ways to make it as stable as possible. During our team meeting tomorrow, we will focus our energy on verifying the accuracy of our predictions, as well as ensuring that our predictions are at the accurate location. This will require the precise alignment between our projector and the camera.