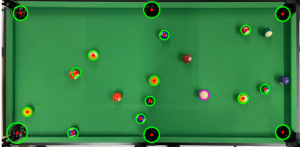
This week we worked on finalizing our backend code for object detection and physics. We were able to finish our physics model, and can now begin testing its accuracy. This week, we also cleaned up our backend code to ease the integration phase in coming weeks. We created documentation for our APIs and refactored our code to align with our updated API design standards. We also took a few steps towards integrating our backend by combining the physics model and object detection model. In terms of the structure of our system, we were able to mount the projector and camera, and we will make our current setup more sturdy in the following week. With these components in place, we are on track to begin testing our integrated design on a live video of our pool table this coming week.Aside from making progress on our system, our group spent a decent amount of time preparing for the ethics discussion scheduled for Monday, March 18th. We each completed the individual components and plan to discuss parts 3 and 4 of the assignment tomorrow (Sunday, March 17th).
This week was a busy week for our team, so there were some tasks that we were unable to complete. Although we planned to create our web application this week, we will now push this task to span the next two weeks, and we will work on this in parallel with our testing on different subsystems. We don’t foresee this delay to pose significant risks as the main component of our project (the trajectory predictions) do not depend on the web application.
We came up with some additional features to implement in our system, and after discussing this in our faculty meeting, we have a better idea of the design requirements. We plan to implement a learning system to give the users recommendations based on their past shots taken. This will require us to detect the point on the cue ball the user hits, as well as the outcome of the shot—whether or not the target ball fell into the pocket. This will require us to implement some additional features in our system, and we plan to complete these in the coming week.
The most significant risk we face now is the potential lack of accuracy of our detection algorithms. As we begin conducting testing and verification, it is possible that there are inaccuracies in our physics model or object detection model that cause our projected trajectory to be inaccurate. In this case, we would need to detect which components are causing the faults and devise strategies to solve these errors. We do have plans in place to mitigate these risks. If there are issues with the accuracy of our object detection models, we may use more advanced computer vision techniques to refine our images. In particular, we may implement OpenCV’s background subtractor tools to better distinguish between the game objects and the pool table’s surface.