Progress
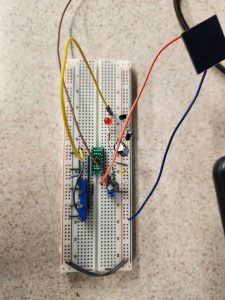
This week I helped write some of the asynchronous backend code for the firmware (along with Gary) and did some preliminary energy harvesting tests with the solar panel. For the energy harvesting, I did some measurements of the solar panel to see if it would be viable. We purchased a solar panel small enough to fit on the band of the watch (23mm x 25mm) and tested it outside with a variety of resistances to find the optimal range for power output. Unfortunately, the weather was changing too quickly to do a complete test, but all measurements showed at least 5mW of power output, and one showed above 15mW. These numbers are incredibly high, and give us a considerable margin for losses should we decide to use a panel. To further test this idea, I built the ADP5090-based boost converter circuit and used it to power an LED. Simply pointing my phone’s flashlight at the solar panel from ~10cm away was enough to power the LED intermittently. This was very impressive. Again, I will need to do more thorough tests in the future, but this is a promising power source.

Pacing
This week I would’ve liked to get some more quantitative measurements of more sources, but I was very busy with other obligations. Next week I don’t have much to be working on, so I should be able to catch up on the testing.
Planning
Next week, I will:
- Finish the measurements of the motor system
- Finish the measurements of the piezoelectric system
- Determine how efficiently the ADP5090 can charge the battery