We have no new risks that we are worried about, nor are there any changes we have made to the design of the system.
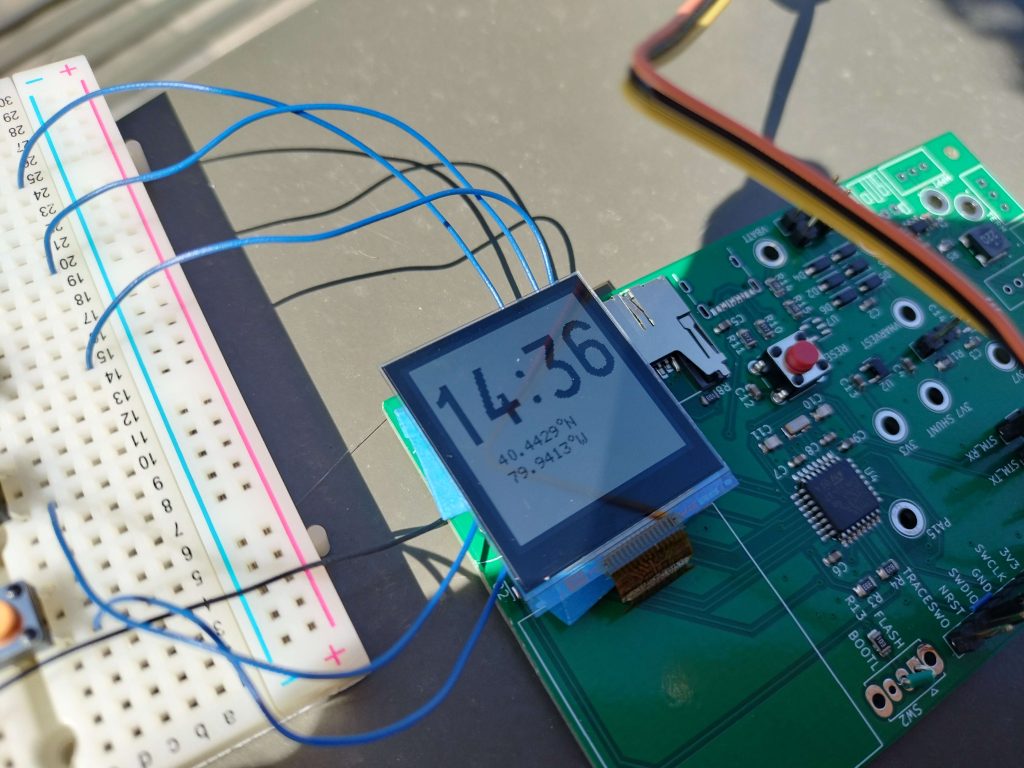
We have run some tests on GPS location accuracy, walking around CMU campus in various conditions and testing to see how long it takes to get a lock and how accurate this lock is. For accuracy, we will compare Landhopper’s location fix against a known-good and known accurate position source, a U-Blox ZED-F9P (which we will borrow from Roboclub). The ZED provides very high-accuracy and high-precision RTK-GPS position fixes, accurate down to a few centimeters, so it is an ideal “ground truth” for comparison.
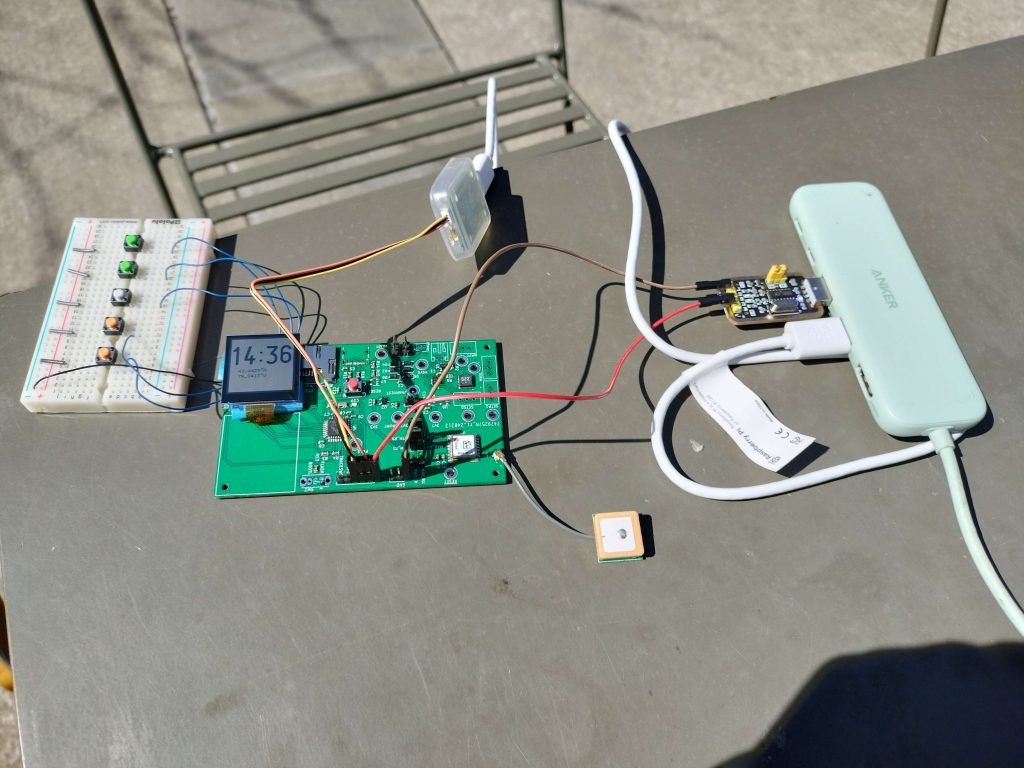
As for actual cases we will test, we want to experiment with various positions for the antenna on the wearer’s wrist to determine which results in the most accurate fix. Simultaneously, we hope to test the amount of battery taken to get a fix, as well as the amount used in typical usage by logging the battery levels along with each location store. We hope to be able to analyze both of these results in order to meet our use case requirements of a week-long hiking trip with high-fidelity tracking, by synthesizing the position data from Landhopper with the power consumption data and visualizing it with QGIS.
Through the course of the project, we have done much analysis to see what energy harvesting source we should use. Though we tried several times to figure out the best way to attach the piezo tiles to a metal band, they always popped off of the band when it was bent to the necessary curvature. We’ve gone through a few versions of the gearbox for the motor generator option, but all of them have either. At the current stage, we’re thinking of cutting our losses on the piezo option, but we’re still going to give the motor option one or two more iterations. If we get it to the point of generating any amount of useful power, we’ll definitely give it a proper comparison against the solar option by determining which harvests the most energy in both indoor and outdoor scenarios.
Solar harvesting is showing to be very fruitful so far: the 15mA we have achieved from full sunlight far outpaces the maximum power generation given in our referenced papers for the piezo and motor techniques (the most given was around 9mA). We will further test with different orientations and positions of the solar panel on the watch case (like with the antenna) to determine which results in the most power generation outdoors. We’ll visualize this data alongside the position and other parameters to make sure we’re meeting our planned requirements.