Progress
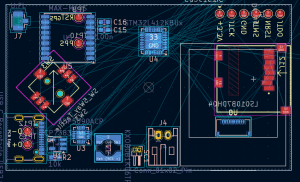
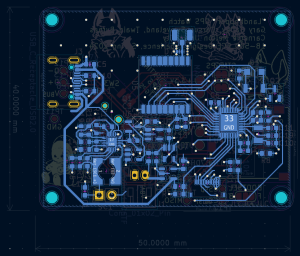
Over the past 2 weeks, most of my work pertained to our final PCB: I finished routing the board, did a design review with Carson, ordered the boards, and worked with Twain and Carson to assemble the board. Here’s what the back of the board looks like in KiCad vs real life.

In addition to the PCB design, I did most of the CAD for our initial case design.
Learning
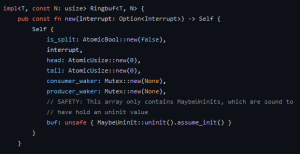
This project has been a huge learning experience for me: nearly every component of the watch which I’ve contributed to has led to me encountering something new. For example, many of the components on our final PCB were not built-in to KiCad’s libraries, so I needed to create custom footprints for them. While I’d used KiCad’s footprint editor before, it wasn’t until this project where I really got adept at creating and customizing footprints. On the firmware side, I learned far more than I wanted to about how to safely manage peripherals in Embedded Rust, in order to integrate several of the libraries which we’re using.
Pacing and Planning
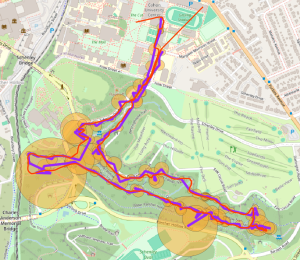
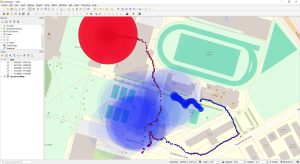
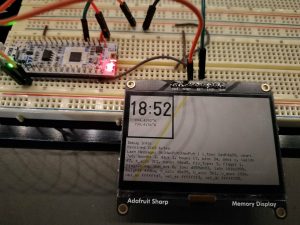
Pretty much the only tasks remaining on the design front are finalizing our case and finalizing our firmware: Carson’s mostly been doing the mapping-related stuff, but I would like to improve our time handling and add some nice-to-haves like alarms. However, there’s also some non-design tasks which need our attention too, such as the looming presentation and reports. Tomorrow I will focus on making sure we have gathered all of the data we want for our final presentation, and over the next week I plan to come up with a solution for how we’re going to typeset our final paper: for our design paper, our final cleanup and typesetting turned into a torturous fight against Google Docs’ layout engine, so I’d like to find something better.