Progress
This week, in the run-up to our interim demo, Carson and I got the SD card and location logging working. I used QGIS to put together this very neat visualization of our first logging test: the size of each dot indicates the detected accuracy of GPS fix, and the color indicates time (blue->red).
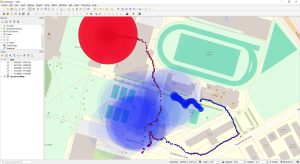
For the GPS accuracy test, I should be able to use QGIS to generate a visualization of the deviation of Landhopper’s detected position from our “known good” RTK-GPS signal (from the U-Blox ZED-F9P which we’ll borrow from Roboclub).
Planning and Pacing
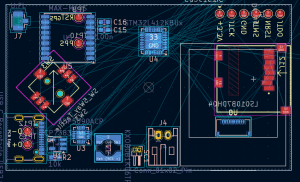
I’m pretty on pace currently. With Carson’s help, I finished pretty much everything I wanted to get done this week. For next week, the plan is to get the final PCB design done as soon as possible, since that’s the most time-critical part currently pending which a whole load of stuff depends on (design -> manufacturing -> assembly -> debugging -> testing). Best case is I get it done tomorrow or Monday, but that’s pretty tight since I also have CompArch homework pending. Here’s what I’ve gotten done on the layout so far, though!