Progress
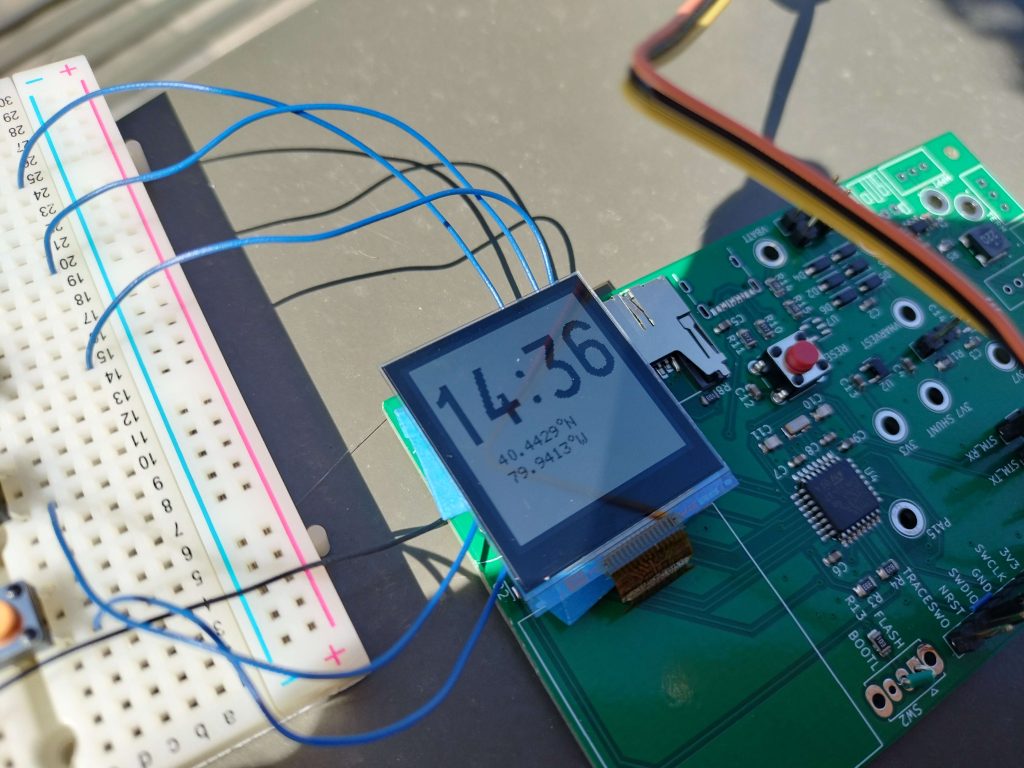
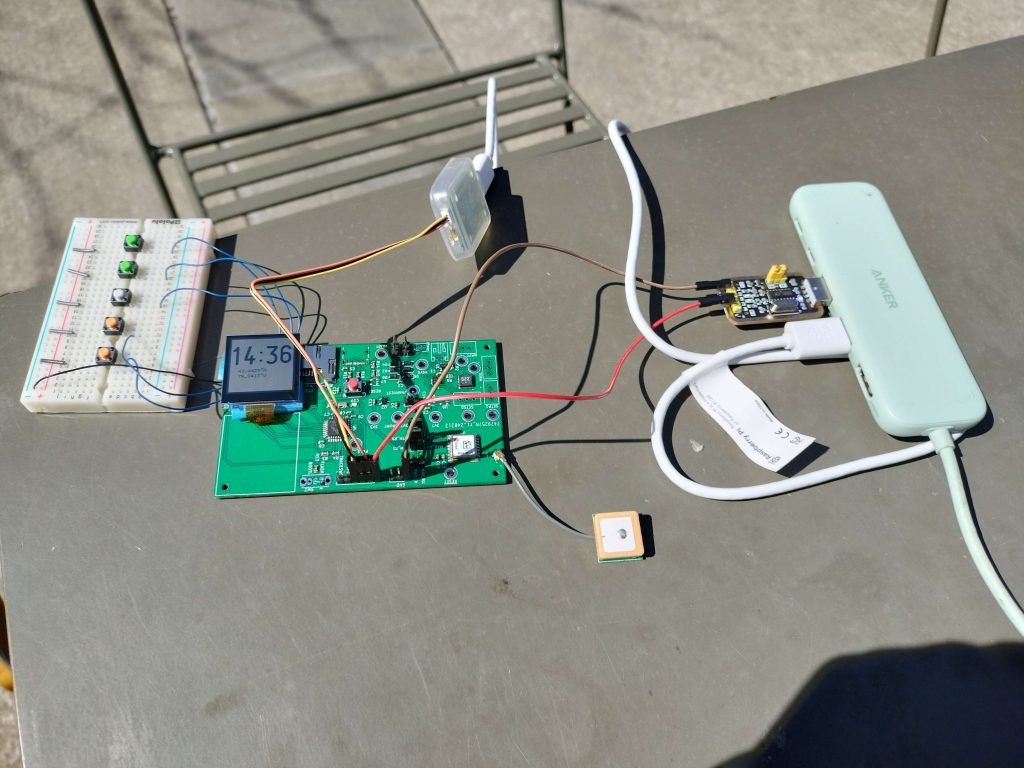
This week I was very busy with preparing Robobuggy for rolls, so I didn’t have much time to spend on this project. I mostly made some tweaks to the map and worked on updating the HAL (hardware abstraction layer) library we use to a later version so that it was compatible with the SD card library, so that we can start working on adding map tiles.
Pacing
We are somewhat behind on overall progress, but we have a really strong set of features for the demo. Fortunately we can have some asynchronous tasks (i.e. having the next PCB be ordered while we work further on firmware).
Planning
Next week we will do final preparations for interim demo (real energy harvesting numbers, demo firmware, etc).