- Weekly Team Meeting (2hr)
- Discuss design changes for the track and carrier t
- Discuss how to best implement the ultrasonic sensor and linear hall effect sensor
- Mandatory Meeting (4hr)
- Discuss design changes for the track
- Go over feedback from design review
- Independent Work (6hr)
- Change one-to-one carrier/track magnet design
- Reattempt two-to-one carrier/track magnet design
- Test linear hall effect sensor
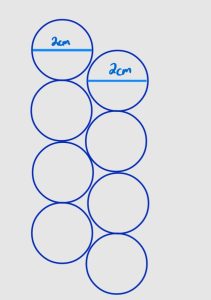
Through out this week I spent time working on the design of two prototypes. I rebuilt the straight away one-to-one track with less spacing between the magnets to stop magnets from the carrier getting stuck. While this helped with that problem, it made it clear that a one-to-one system is unstable. I attempted to redesign the two-to-one carrier/track. In this design two aligned rows of magnets were placed on the track. However, given that the magnets are circular, parts of the track had gaps as seen in the picture below. These gaps resulted in carrier magnets getting stuck on the track. I have created a new design in which the magnets (2cm diameter) are misaligned by 1cm. I plan to implement this design early next week.
I also tested the linear hall effect. I tested how the linear hall effect behaved when a magnet was near the sensor, far from the sensor and when a magnet moves along it. I used this information to better understand the data I was receiving from the Arduino and how to interpret that information into something usable.
We updated our schedule earlier this week to more accurately reflect what we have complete and what we know hope to complete. Therefore, I am currently on schedule.
Next Week
In the following work, I plan to build my new design for the two-to-one track/magnet design. I also want to work with my teammates to see how to add a speed coil to the one-to-one track/magnet design given its only problem currently is stability. Lastly, I would like to start signal processing for the linear hall effect sensor.