
WORK ACCOMPLISHED:
I dove back into VESC software and realized we may not be needing it but will likely instead be replicating the functionality. 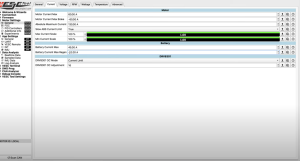
One crucial component when using VESC software is motor configuration. Above is a screenshot of the VESC software. When setting up the VESC with this software, we are setting important things such as Voltage Limits, Current Limits, Motor RPM Limits, Temperature Limits, Motor Tuning, Startup Boost, and Regenerative breaking. In the absence of a VESC, my plan to tackle each of these is as follows:
Voltage Limits/ Current Limits: We will calculate our battery and VESC’s voltage limit and place ceilings on the speed of the motors relative to the cap we impose to make it physically impossible to exceed our limits, even at maximum motor speed. In the case where this is not possible or does not prove to be effective, we will add external current-limiting circuits with a current/voltage sensor.
RPM: We will use Hall sensor data to keep a close watch on the RPM and throttle if we exceed a certain limit we will impose. This can be done through RPi packages.
Temperature: Similar to RPM, our hall sensors will allow us to understand the temps of our motors at any given time. We will have a circuit-breaker esque trip system that will cause the board to slowly come to a stop if we exceed same measurements.
Motor Tuning: We will likely have to measure the motors with an LCR to determine the resistance and inductance to help define how we will set our acceleration curves.
Startup Boost: When in the initial phase of the motor, we will supply slightly extra current to avoid dead-stop stalling.
Regenerative Breaking: We will not be incorporating this feature.
PROGRESS:
I am on track with my goals as set out by the Gantt chart. I am somewhat blocked in waiting for the VESC to arrive to begin applying the theory and ideation to a practical and testable environment to begin making adjustments as necessary. When we return to school, I will be able to work on this in a much more effective and efficient manner.
NEXT WEEK’S DELIVERABLES:
- Assemble as much of the board as possible.
- If the VESC is here, begin running tests and playing around
- Specifically decide concretely about UART vs PWM.
- Ensure we are able to read data from the Motors and send it back to the RbPi.