
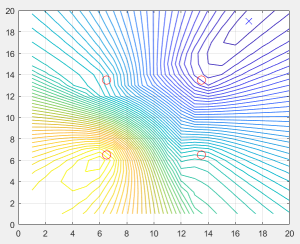
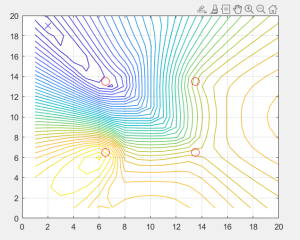
This week I worked on the forward audio triangulation method with the real life scale in mind. I limited the bounds of the audio source to 5 feet from each side of the robot’s base and placed the microphones at a closer distance. I accounted for accurate values in units to make my approximation possible. Using this, and knowing the sound source location, I was able to pinpoint the source of the audio cue. I used a smaller scale to go over the grid dimensions to have a closer approximation. This is to allow low inaccuracies in the direction that the robot is going to turn to.
I randomly generate the audio source location, and below are some of the simulations for this. The red circles denote the source of audio and the cross indicates the audio source.
After this, I pivoted from audio triangulation and focused on tasks such as setting up the RaspberryPi, doing tests for the TTS with Shannon and learned about the WebSocket connection methodology. I joined Shannon and Jeffrey’s session when they discussed the WebSocket’s approach and learned about it
During setting up the RaspberryPi, I ran into some issues with it, while trying to SSH to it. Setting up folders and the basics however went well. One task for next week is to reach out to the department to get more information about prior connections with the raspberry pi. It is already connected to CMU Secure as well as CMU devices networks, however it doesn’t seem to be working with the CMU device network. I tried registering the device to CMU Devices, but it seems like it has been registered prior to this semester. I aim to figure out the issue with SSH-ing to this device over the next week. However, we can still work with the RPi using a monitor, so this is not a big issue.
After this, I worked on Text-To-Speech along with Shannon, and worked on the pyttsx3 library. We intended so that the WebApp reads various texts back to back through the text/file input mechanism. The library works by initializing a text engine, and uses the function, engine.say(), to read the text input. This works when running the app for the first time. However after inputting data for the second time and onwards, it gets stuck in a loop. The built-in engine.stop() function requires multiple instances of initialization of the text engine, which causes the WebApp to lag. As a result, Shannon and I have decided to look into more TTS libraries that can be used for python, and also we will try testing the TTS directly on the RPi instead of the WebApp first.
My progress is on track, the only setback is the late arrival of ordered parts. As described in the team weekly report, I will be using the slack time to accommodate for progress with assembling the robot, and integrating systems.
Next week I will be working on finalizing the audio triangulation, work with Shannon to find the optimal TTS functionality and work with Jeffrey to build the hardware.