
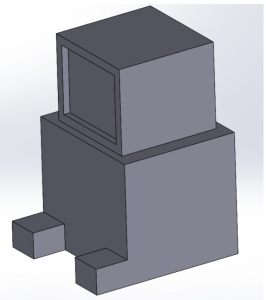
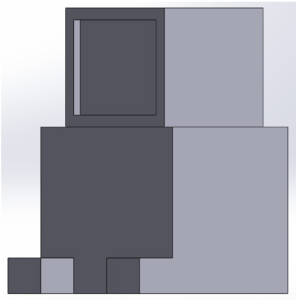
This week, I worked on the CAD design of our Studybuddy robot using Solidworks. After discussing with my team about the space constraints and objects we will need to integrate in the robot, we decided on general dimensions that give optimal dimensions. The base box is 8in x 7in x 6in. The head is 6in x 6in x 5in. The DCI display screen will be attached to the head in the designated extrusion as shown in the CAD drawing. The legs will contain buttons to power on the robot, pause and continue timers if necessary and buttons to interactively play rock paper scissors. Output of the buttons will be displayed on the DCI display from both players.
Considering the fact that the directional microphones are not reliable to pinpoint the exact direction of sound, I would have to start by creating simulations to see how the audio is delivered at different corners of the robot. I am still planning to use a combination of the MEMS array of microphones along with the directional microphones. Following the previous week’s feedback and finalized the microphones and will start creating simulation models to conceptualize the system behavior.
I am on track with the progress for this week. I have identified the microphones and servo motors we will be using for the robot. In addition, I have borrowed (free) a photoresistor, an ultrasonic sensor, and a temperature and humidity sensor for testing purposes.
By next week, I would like to get more research regarding the audio triangulation mechanism and mathematical derivation. I will be setting up the text-to-speech libraries on a computer and figure out the integration with RaspberryPi, and setting up speakers from the RPi by week 7 with Shannon. I will also meet with Jeffrey to analyze motor specifications including the voltage, power and torque using datasheets.