
This week, I worked on Audio localization mechanism, servo initialization through the RPi and ways of mounting the servo to the robot head for seamless rotation of the head.
Audio localization:
I have a script that records audio for a specified duration, in our case would be every 1.5 seconds, and this will take in an input audio and filter out the clap sound from the surrounding using a bandpass filter. This audio input from each mic is then passed into the function that performs the direction estimation by performing cross correlation between each microphone.
I have finalized the mathematical approach using the four microphones. After calculating the time difference of arrival between each microphone, I have been able to get close to the actual input arrival differences with slight variations. These are causing very unstable direction estimation to a margin of error to up to 30 degrees. The coming week, I will be working on cleaning up this error to ensure a smaller margin of error, and a more stable output.
I also did some testing by using only three of the microphones in the orientation (0,0), (0, x), (y, 0) as an alternative approach. x and y are the dimensions of the robot(x = 8 cm, y = 7cm). This yields slightly more inaccurate results. I will be working on fine-tuning the 4 microphones, and as needed, I will modify the microphone positions to get the most optimal audio localization result.
Servo and the RPi:
The Raspberry pi has a built-in library called python3-rpi.gpio, which initializes all the GPIO pins on the raspberry pi. The servo motor connects to the power, ground and a GPIO pin which receives the signal. The signal wire connects to a PWM GPIO pin, to allow for precise control over the signal that is sent to the servo. This pin can be plugged into GPIO12 or GPIO13.
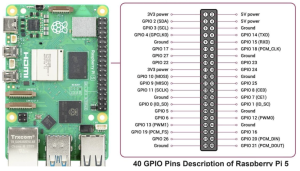
After this, I specify that the pin is an output and then initialize the pin. I use the set_servo_pulsewidth function to set the pulse width of the servo based on the angle from the audio localization output.
Robot Neck to servo mounting solution:
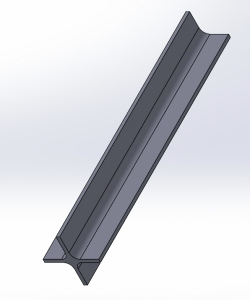
I designed a bar to mount the robot’s head to the servo motor while it’s housed in the robot’s body.
The CAD for this design is as follows.


By next week, I plan to debug the audio triangulation and minimize the margin of error. I will also 3D print the mount and integrate it with the robot, and begin integration testing of these systems.