
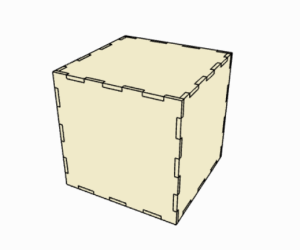
This week, I worked on the robot base structure building. Based on the CAD drawing we did earlier in the semester, I generated parts for the robot base and head that have finger edge joints. This allows for easy assembly. This way we can disassemble the box to modify the parts on the inside, and easily reassemble it back. The box looks as follows:
During this process, I used the 1/8th inch hardwood boards we purchased and cut out every part of the body. The head and the body are separate, as they will be connected with a rod to allow for easy rotation and translational motion. This rod will be mounted to the servo motor. As a reminder, the CAD drawing looks as follows.

I laser cut the boxes and assembled each part separately. Inside of the box, we will be placing the motors, RPi, and speakers. The wiring of the buttons will also be placed in the body of the robot. The results are as follows. The “feet” of the robot will be key inputs, which haven’t been delivered yet. The result so far look as follows:



In addition to these, I worked on the TTS functionality with Shannon. I did some tests and found that the Pyttsx3 library works when running text input iterations outside of the webapp. The functionality we are testing is integrating the text input directly into the text to speech engine. This kept causing the loop error. When I tested the pyttsx3 in a separate file where I pass in various texts back to back by only initializing the engine once, it works as expected.
We also worked on the gTTS library. The way this works is, it generates an MP3 file for the text file input and then reads that out once it’s done. This file generation causes a very high latency. For a thousand words, it takes over 30 seconds to generate the file. Despite this, we came up with plans to break up the file into multiple chunks and create the MP3 files in parallel, lowering the latency. This would get us to a faster TTS time, without having any issues similar to the pyttsx3 library. This is a better and fully functional alternative from our options, with a reasonable tradeoff of having slightly longer latency for longer texts for a reliable TTS machine.
In the coming week, I will be working mainly on finalizing the audio triangulation along with some testing, and begin integrating systems the servo system with the audio response with Jeffrey.