
This week, my primary focus was gathering data for the design report and completing tasks related to audio localization.
For the audio localization, I used MATLAB to simulate and pinpoint an audio source on a randomly generated 10×10 grid. I arranged the microphones in a square (2×2) configuration and randomized the location of the audio source. By calculating the distance between each microphone and the audio source, and considering the speed of sound (approximately 343 m/s), I determined the time delays relative to each microphone.
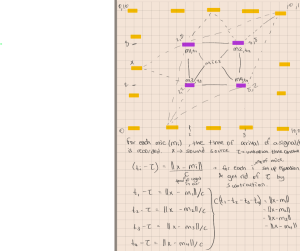
I applied the Time Difference of Arrival (TDOA) method. For each pair of microphones, the difference in the time it takes for sound to reach each microphone forms a hyperboloid. I repeated this process for every microphone pair, and the intersection of these hyperboloids provided a reasonable estimate of the audio source’s location. In MATLAB, I looped over the grid and computed the integer intersections of various locations. Using the Euclidean approach, I predicted the distance and calculated the corresponding TDOA using the speed of sound. By comparing the predicted TDOA with the actual time delays, I tried to estimate the error in the localization process.
The following figure illustrates the results, where ‘X’ represents the audio source, and ‘O’ marks the microphone positions. Additionally, I will include the relevant equations that informed this approach.
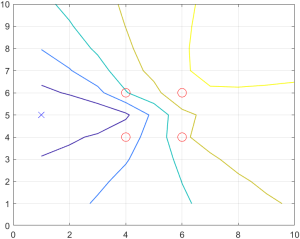
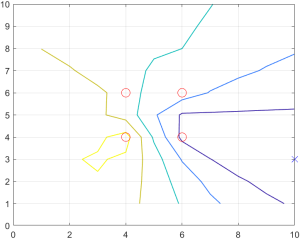
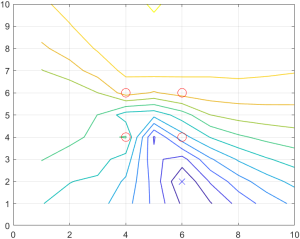
Currently, I am facing an issue with pinpointing the exact location of the source. To address this, I plan to refine the grid resolution by using smaller iterations, which should allow for greater accuracy. I will also calculate and display the approximate error in the final results. So far, I have a general idea of the audio source’s location, as indicated by a dark blue line, and I will continue working to pinpoint the exact position. Once I achieve this, I will conduct further simulations and eventually test the system using physical microphones, which will introduce additional challenges.
I am slightly behind on the project schedule. By next week I aim to finalize the audio localization section of the design report, along with the remaining parts of the report, in collaboration with my team. I had a goal to setup the robot neck rotation servos by this week. This hasn’t been done as well. We will be finalizing the bill of materials by this week. I will be working on this as early as the components get in. To make up for this, I will be spending some time over fall break working on this.
According to the Gantt chart, Jeffrey and I had planned on building the robot, by the end of this week. This hasn’t been completed yet, but the CAD design is already completed. This week we will meet and discuss more about space constraints and make decisions accordingly.