This week was spent improving and testing the Bluetooth code to verify its performance. Following last week’s changes, there appeared to be some lingering interference between the two sticks (~100ms delay) when playing together. Paired with the CV processing, I concluded that this was not acceptable latency, so I changed the firmware and host code to run BT Classic rather than BLE. The main changes involved identifying serial ports for each of our ESPs as well as advertising and sending data as a byte array with the BluetoothSerial library rather than notifying with BLEdevice. The laptop code was relatively simple to implement, considering I only needed to work with serial input similar to UART. Following these changes, I set up a test to verify that the interference between the two sticks was lowered; I used matplotlib to take timestamps between when the accelerometer data was first received and when the sound output played, and I overlayed the delays of the two sticks to compare their relative performances.
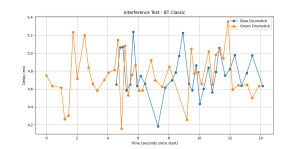
I’m satisfied with these results, since this was our most persistent issue and both sticks are now operating at similar performance. It also gives us an opportunity to highlight the design tradeoffs between lower power consumption and reduced interference on the 2.4GHz band for BLE and BT Classic, respectively. I believe our team is on track to have a fully working project before the demo date, and I plan to spend this week extensively testing the system in various environments and conditions to locate any edge-case bugs.