
For this week’s tasks, I put my efforts towards developing the client and server code to transmit accelerometer data over BLE. The firmware for this project’s microcontrollers will be oriented around an Arduino-based framework, providing us access to abstracted libraries for I2C and serial debugging as well as a straightforward IDE to compile, flash, and monitor our code. Because I prefer to work with VS code over the native Arduino platform, I used a third-party extension, PlatformIO, for embedded development on Arduino boards.
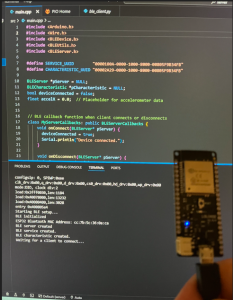
I first set up a C++ file to represent the server initialization onboard the ESP32. The code is structured with the standard Arduino setup and loop, with added callback functions declared using the BLEServer library to handle connection status. In initialization, I set the serial baud rate to the UART standard of 115200 in order to allow USB communication to an output monitor. Using this output, I was able to find the MAC address of the microcontroller by printing it with a method from the BLEDevice library. I found that typecasting between the Arduino String type, the C++ std::string, and the C char array was a bit convoluted, which is something I will keep in mind in case we decide to append timestamps with the ESPs rather than the host controller. I then created the generic service for accelerometer data and added a characteristic to store the intended floating point value–the UUIDs used in these two operations were defined globally and found from sections 3.4 and 3.8 of the SIG group’s official identifiers found here: https://www.bluetooth.com/wp-content/uploads/Files/Specification/HTML/Assigned_Numbers/out/en/Assigned_Numbers.pdf?v=1729378675069. The board then starts advertising and loops on the condition of a valid connection.
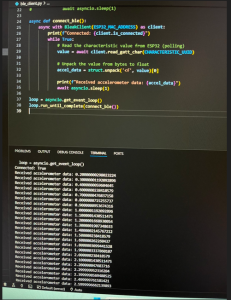
I also created the client side code which connects to the device address using bleak. For this stage of development, my goal was to simply get some form of communication between the two devices, and so I opted for a simple polling loop with the asyncio library. I did this by reading straight from the GATT characteristic and unpacking these bytes to a comprehensible float. For future improvements to latency, I plan to use the server to notify the host controller as opposed to the current blocking behavior. For testing my current program, the loop on the flashed code sets the characteristic to an arbitrary value and increments at a one second interval, which the client then reads directly.
This code is a good step forward, but I am a bit behind currently, considering I have not yet soldered the accelerometers to the ESP boards. Moving into the next week, my goal is to lower the latency as much as possible and start incorporating the MPU6050s to get a better idea of what the overall output lag will be. Specifically, this week I will:
- Clean up the Bluetooth program to make it modular for integration with Ben and Belle’s work while also ensuring versatility across different devices.
- Make an RTT test to get a baseline delay metric for the BLE module.
- Connect accelerometers to the ESP32s and start collecting data.
- Work on the system controller and the multithreaded code. There will likely be concurrency conflicts even with the system broken into separate threads, meaning that getting an estimate of the delay is our most important objective.