Risk and Plans
What are the most significant risks that could jeopardize the success of the project? How are these risks being managed? What contingency plans are ready?
- Radar Angular and Distance Limitations
Testing revealed that the KLD7 radar sensor effectively detects motion and speed within ±80° horizontally but fails to capture objects at the extreme edges (±90°) and vertical detection is limited to 34°, as confirmed by the data sheet and initial tests. The radar sensor’s narrow detection field creates potential blind spots that could limit its ability to detect obstacles early enough for the user to safely detour around them. This is acceptable as the primary purpose of the vest is to detect obstacles from a distance to allow for detours. This range complements the white cane by providing early warnings. With the current setup, obstacles within ±80° are effectively detected, aligning with our goal of alerting the user in advance rather than detecting objects immediately to the side. However, in testing, we identified two specific areas—at approximately -60° and -20°, and at distances around 3m to 4.5m—where the radar did not consistently detect movement. Interestingly, we found that obstacles in these areas could sometimes be detected only when backing away from them, indicating a sensitivity limitation in detecting approaching objects within certain angles and distances. Additionally, we noticed that physical barriers such as tables, computer monitors, and chairs can block radar signals, creating detection gaps when the radar is close to these objects. However, since the user will be wearing the device while walking, these obstacles (like chairs and computers) will be detected relative to the user and trigger an alert as intended. What’s behind these obstacles does not need to be detected, as it lies outside the immediate path of the user. The empty space circled in red in the image below demonstrates this intentional detection gap:
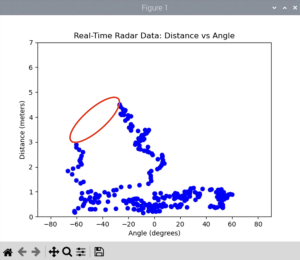
To manage detection gaps (-60, 3) and (-20, 4.5), we will adjust the radar positioning and conduct additional tests with carefully marked angles and distances on the floor to better capture a consistent detection field. During our last test, we notice that adjusting the tilt and height can help cover critical areas more effectively. We will also fine-tune the sensor’s sensitivity settings to balance between detecting desired objects and minimizing false positives. We plan to adjust parameters such as detection range, speed thresholds, and angle sensitivity which requires us to refer to the sensor’s documentation for guidance on these adjustments. If these adjustments do not fully resolve the issue, we may apply advanced signal processing methods to filter out noise and enhance target detection. We found techniques like supervised learning can improve range precision by reusing learned patterns.
- GPS Indoor Signal Loss
The GPS module demonstrated very accurate signal acquisition outdoors, where it was able to consistently track precise longitude and latitude coordinates. This reliable outdoor performance is shown in the graph below:
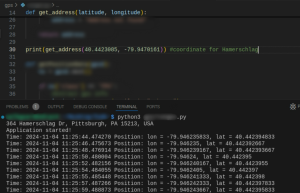
GPS testing confirmed limited functionality indoors, with no signal detected even when near windows, which restricts the usability of WalkGuard in indoor settings. Given GPS’s reliance on line-of-sight to satellites, this limitation could affect location accuracy for users within buildings or obstructed areas.
To address this, we will first try optimize Antenna Placement. We will test with positioning the GPS module or its external antenna near windows or areas with minimal obstructions to improve signal reception again. While this may not guarantee a fix, it can enhance the chances of acquiring a signal. We are also considering using phone-based geolocation (via cellular networks and Wi-Fi) as a fallback for indoor positioning. This would allow the app to maintain a general location estimate even when GPS is unavailable. In the upcoming week, we’ll experiment with this method to evaluate its accuracy and feasibility for indoor tracking. If we pursue this approach, we will need to incorporate device permissions and ensure data integration between the phone’s geolocation data and our backend system.
- Accelerometer Calibration for Fall Detection
Initial accelerometer testing showed it can capture movement, but distinguishing between minor movement and actual falls will require tuning. Fall detection relies on accurate thresholds and pattern recognition, and without proper calibration, it may either miss falls or generate false alarms.
We will test and refine calibration settings to isolate the specific accelerometer data patterns that indicate falls, including adjusting sensitivity levels and applying filtering algorithms to exclude incidental movement. This process will involve multiple rounds of testing with simulated falls and adjustments based on data review. We’ll also create a fallback system where users can manually cancel alerts with a button to reduce false positives. Button has arrived already.These strategies will allow us to proceed effectively.
Change in Design
Were any changes made to the existing design of the system (requirements, block diagram, system spec, etc)? Why was this change necessary, what costs does the change incur, and how will these costs be mitigated going forward?
While we haven’t formally modified the core design, the need for reliable location data indoors has prompted us to explore additional layers of geolocation beyond GPS. If we confirm phone-based geolocation is viable, it would integrate into the app as a complementary feature rather than a replacement, making sure location tracking is consistent without compromising GPS’s outdoor accuracy.
Schedule Updates
Provide an updated schedule if changes have occurred.
Despite the technical challenges, our project remains on schedule. The hardware and software components have been tested individually, and integration work is beginning as planned. Next week, we will focus on:
- Structured radar testing with standardized angle and distance markers.
- Accelerometer calibration for improved fall detection accuracy.
- Testing gps and phone-based geolocation to determine its feasibility for indoor positioning.
We are preparing for a cohesive integration phase in the coming weeks, targeting a smooth transition into full-system testing before the demo.